
W poradniku lotów nawigacyjnych (patrz rozdział 9) dowiedziałeś się o VFR, a podczas lotu zapoznałeś się z większością przyrządów pokładowych w C172P. Teraz wykonamy lot według wskazań przyrządów (IFR). W tym locie zapoznasz się z pozostałymi instrumentami, dowiesz się trochę o lotach IFR i nauczysz się wielu, wielu TLA (Three-Letter Acronym) – akronimów trzyliterowych.
Wykonamy ten sam lot, z Reid-Hillview (KRHV), pas 31R, do Livermore (KLVK), pas 25R, tylko tym razem w warunkach IFR: podstawa chmur 200 ft nad poziomem terenu z widocznością 800 metrów. Zakładam, że ukończyłeś poradnik lotów nawigacyjnych.
Poradnik ten nie ma na celu nauczenia Cię, jak latać IFR. Ma to raczej dać przedsmak tego, czym są loty IFR, i odsłonić tajemnicę przyrządów nawigacyjnych, które nie zostały omówione w poradniku lotów nawigacyjnych.
Nie jestem pilotem. Podobnie jak w poprzednim poradniku, informacje te zostały zebrane z różnych nieautorytatywnych źródeł. Jeśli znajdziesz błąd lub nieporozumienie, daj mi znać. Napisz do mnie na bschack-flightgear -at- usa -dot- net.
Ten lot odbył się przy użyciu FlightGeara w wersji 3.0. Nowsze lub starsze wersje FlightGeara mogą się nieco różnić (zrzuty ekranu zostały zaktualizowane i pochodzą z wersji 2020.3.11. Poza tym mapa podejścia dla Livermore jest już nieaktualna, jednak FlightGear wciąż oferuje wycofane pomoce nawigacyjne, więc tutorial można wykonać – przyp. tłum.).
Musimy poinformować FlightGeara o warunkach lotu. Są różne sposoby na ustawienie naszej pożądanej pogody, my użyjemy menu pogody w symulatorze. Po uruchomieniu FlightGeara, kliknij Środowisko → Pogoda, aby otworzyć okno z ustawieniami pogody. Z listy Weather Conditions wybierz CAT I minimum.
Dzięki temu uzyskamy niski pułap chmur i ograniczoną widoczność. Niestety da nam to też dość mocny wiatr. Jeśli nie chcesz się z nim zmagać, możesz go łatwo wyłączyć:
Naciśnij przycisk OK aby FlightGear zaakceptował zmiany i zamknął okno pogody.

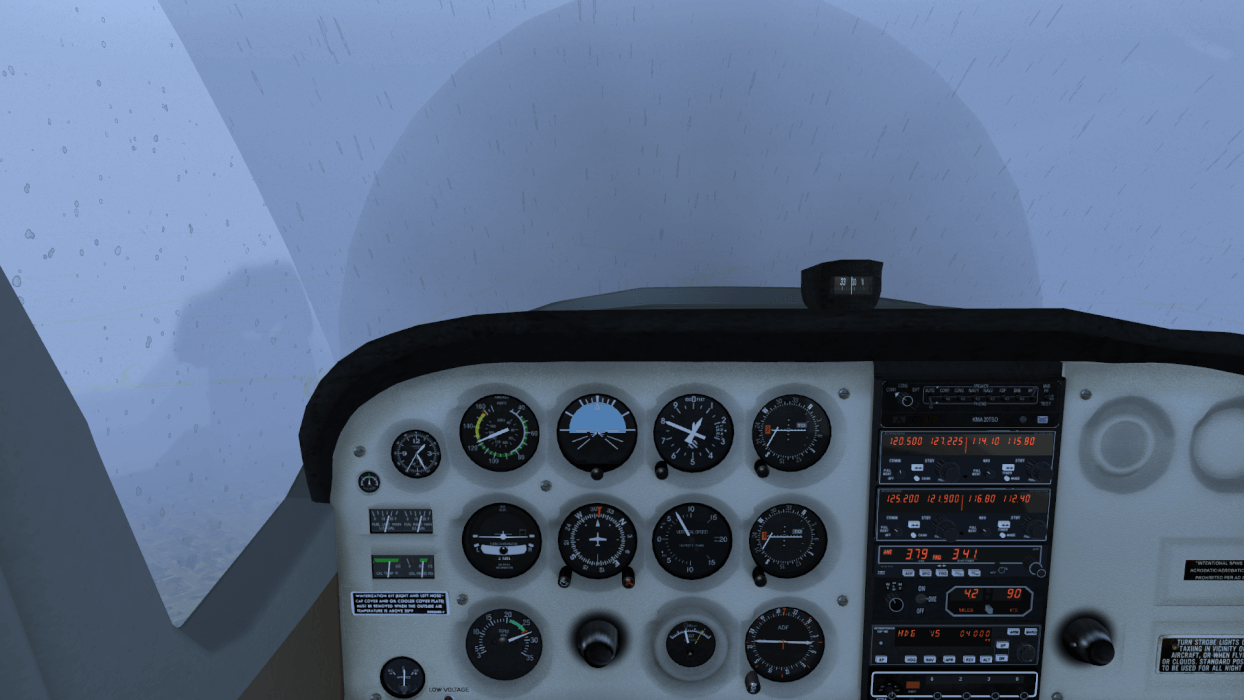
Kiedy wyjrzysz przez okno, zobaczysz coś takiego jak na rys. 10.2. Te chmury nie wyglądają zbyt przyjaźnie i trudno jest dostrzec koniec pasa startowego. Może powinniśmy po prostu pojechać tam Cessną. I tak planowaliśmy poćwiczyć sterowanie naziemne…
Jak więc dostać się z punktu A do punktu B, przy braku widoczności? Istnieje wiele sposobów, które ewoluowały przez lata, z różnymi zaletami i wadami. Podczas lotu będziemy wykorzystywać wszystkie instrumenty nawigacyjne, którymi dysponuje standardowa Cessna 172P, po to, by dać przedsmak możliwości jakie oferuje.
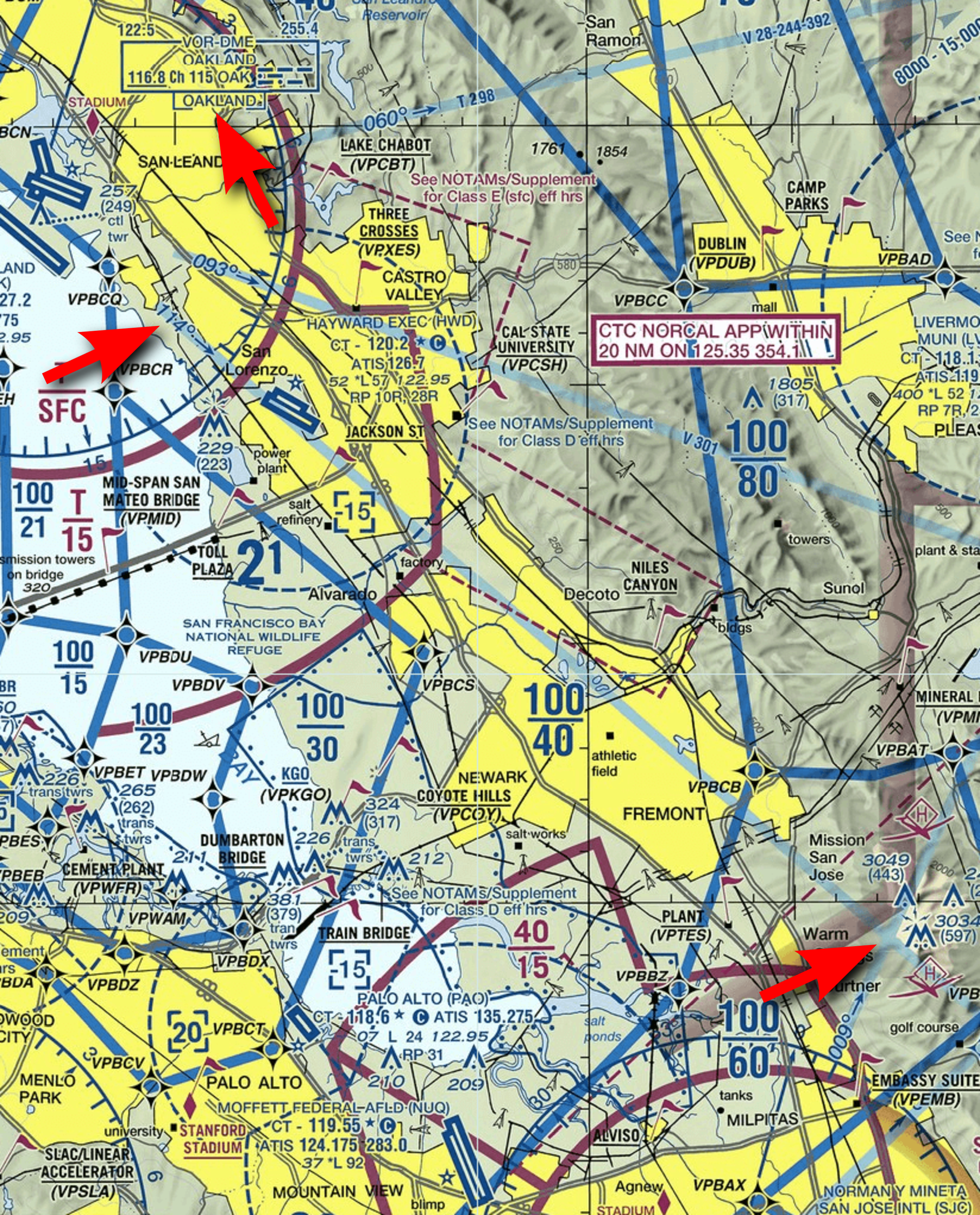
Cała nasza trasa i pomoce nawigacyjne, których będziemy używać, są pokazane na rysunku 10.3. Nasza trasa zaznaczona jest na zielono, pomoce nawigacyjne w kolorze niebieskim i czerwonym. Trasa wygląda na nieco szaloną – można się zastanawiać, czy korzystając z naszego wymyślnego sprzętu, nie pogubimy się jeszcze bardziej, niż lecąc tylko przy użyciu naszego doświadczenia, ufając własnym osądom. Otóż w tym szaleństwie jest metoda. Zamiast przytłaczać Cię szczegółami, wyjaśniając to wszystko teraz, wyjaśnię to krok po kroku w dalszej części.
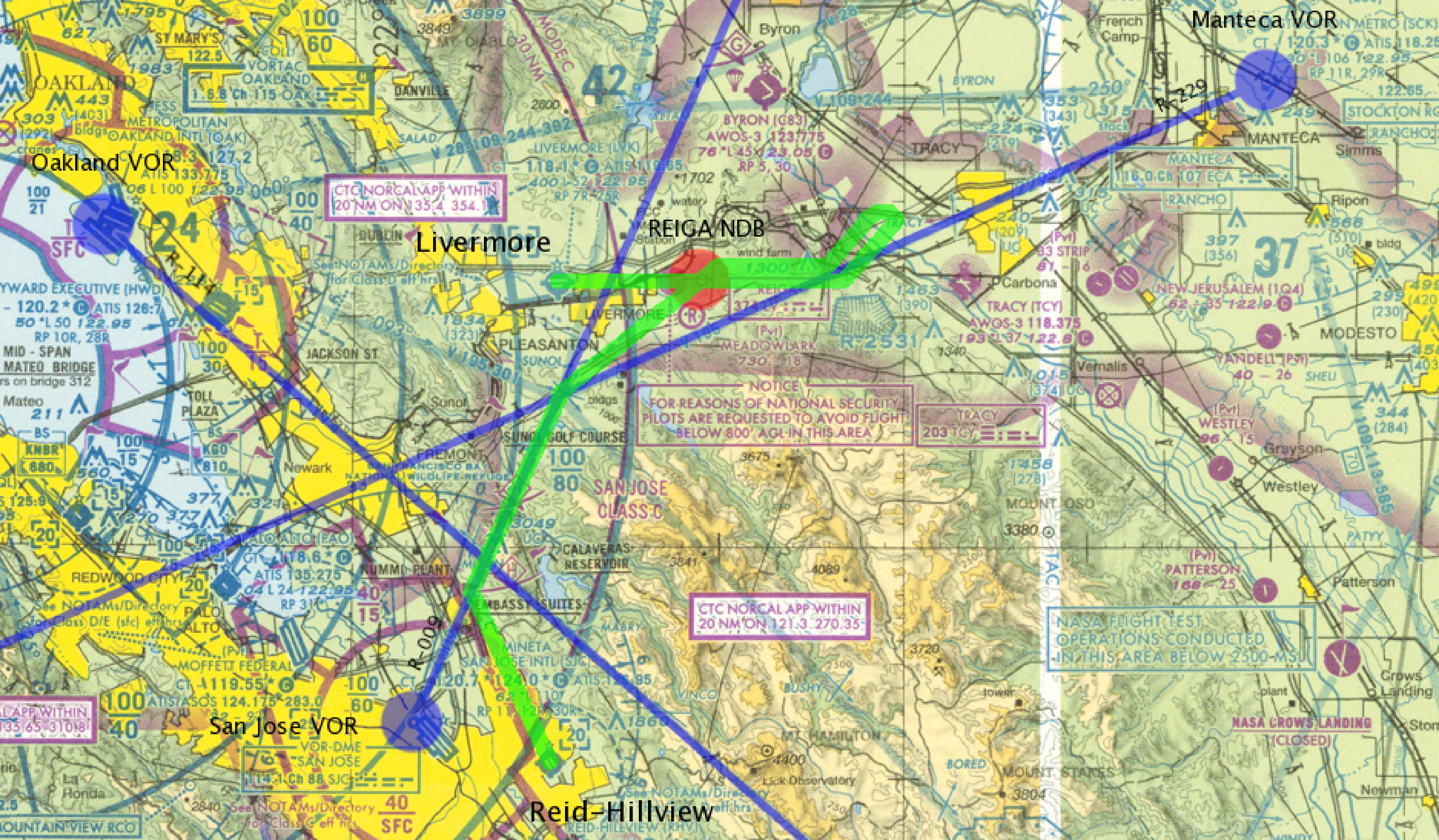
Pierwszą pomocą nawigacyjną będzie VOR1, który doprowadzi nas do punktu około 5 nm (mil morskich) na południe od Livermore.
Stacje VOR są oznaczone na mapach dużym niebieskim kołem z oznaczeniami kompasu na zewnątrz. Zaznaczyłem ich środki dużą niebieską kropką. Reid-Hillview znajduje się w pobliżu VOR-a San Jose, co widać na rys. 10.3. W pobliżu środka koła, w niebieskim prostokącie, znajduje się informacja o radiolatarni. Według tych informacji, jest to radiolatarnia VOR-DME (DME wyjaśnię później), jej nazwa to San Jose, jej częstotliwość to 114,1 MHz (lub Channel 88, który jest alternatywnym sposobem powiedzenia tego samego), a jego identyfikatorem, czyli „ident”, jest SJC (co w kodzie Morse’a brzmi . . . . - - - - . - . ).
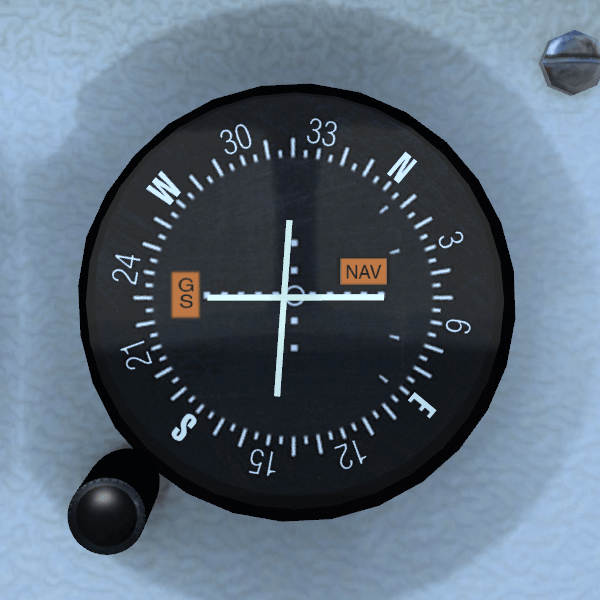
Aby dostroić się do radiolatarni VOR, używamy jednego z odbiorników NAV, które są sparowane z odbiornikami COMM (patrz rys. 10.4). I nawigujemy za pomocą odpowiedniego wskaźnika VOR. W tym przypadku wybierzemy odbiornik NAV1 (i wskaźnik VOR1) (równie dobrze działałby NAV2). Przed ustawieniem częstotliwości, sprawdź wskaźnik VOR1. Powinien wyglądać jak VOR1 po lewej, na rysunku 10.5. Ważną rzeczą jest czerwona flaga „NAV”. Oznacza ona, że nie ma sygnału VOR, więc nie możemy ufać wskaźnikowi.

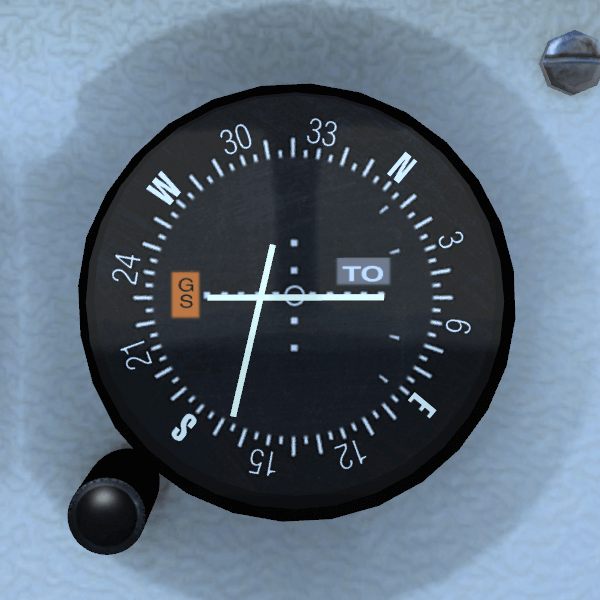
Odbiornik radiowy NAV ma częstotliwość aktywną, częstotliwość rezerwową i pokrętło strojenia, podobnie jak odbiornik COMM2. Dostrój go do 114,1 MHz i naciśnij przycisk podmiany częstotliwościNAV1 ⇒ 114,13. Jeśli spojrzymy na VOR1, powinnniśmy zauważyć, że czerwona flaga „NAV” zniknęła i została zastąpiona flagą „TO”, jak pokazano po prawej stronie rysunku 10.5. To znaczy, że otrzymujemy sygnał. Tylko czy to jest prawidłowy nastaw? Co się stanie, jeśli przypadkowo ustawimy złą częstotliwość?
Aby potwierdzić, że jesteśmy dostrojeni do prawidłowego VOR-a, nasłuchujemy jego identyfikatora. Jeśli nie słyszysz identyfikatora lub jego kod Morse’a nie pasuje to tego co jest na mapie, nie ufaj jego wskazaniom. Do tej pory prawdopodobnie nic nie słyszałeś. Czemu? Sprawdź panel audio (patrz rys. 10.4). Zauważysz, że istnieje przełącznik dla wszystkich instrumentów, które wydają użyteczne dźwięki, a NAV1 jest jednym z nich. Przestaw przełącznik w górę (lub w dół – to nie ma znaczenia), a powinieneś usłyszeć: . . . . - - - - . - . 4 . Dobrze. Przestaw przełącznik z powrotem na środek, gdy znudzi Ci się słuchanie kropek i kresek.
Wróćmy do wskaźnika VOR1. W lewym dolnym rogu znajduje się pokrętło, zwane OBS (Omni Bearing Selector). Jak niejasno sugeruje nazwa, służy do wyboru radiala. Jeśli je obrócisz, powinieneś zobaczyć ruch pionowej igły, zwanej CDI (Course Deviation Indicator)5. Spróbuj wyśrodkować pionową igłę. Powinna być wyśrodkowana, gdy mała strzałka na górze, wskazuje na radial 277. Ta liczba i flaga „TO” oznaczają: „lot w kierunku 277° zaprowadzi Cię bezpośrednio do radiolatarni”.
No świetnie, tylko że zgodnie z naszą trasą nie chcemy lecieć do radiolatarni. Właściwie chcemy przechwycić jasnoniebieską linię oznaczoną „009°” (radial 9 stopni) lecąc od radiolatarni. Jak to zrobić? Bardzo prosto. Ustaw OBS na 9VOR1 OBS ⇒009. Kiedy przelecimy przez radial, igła wycentruje się, a flaga powie „FROM”. Oznacza to: „lot w kierunku 009° bezpośrednio od radiolatarni”, a tego właśnie chcemy. W tym momencie skręcimy w prawo na kurs 009°.
Ostatnia rzecz – ustaw wskaźnik heading, na żyroskopowym wskaźniku kursu, na nasz aktualny kurs pasa (około 310°)HDG ⇒310.
Jednym z efektów naszej zmiany warunków pogodowych jest to, że ciśnienie atmosferyczne nie jest już standardowe, czyli 29,92 inHg. Nasz wysokościomierz musi znać prawidłową wartość ciśnienia, w przeciwnym razie będzie wskazywał niepoprawną wysokość. Nie jest to kluczowe przy starcie, ale może zrobić ogromną różnicę podczas zniżania przez chmury.
Jak opisano w poradniku lotu nawigacyjnego, aktualne ciśnienie barometryczne otrzymujemy za pośrednictwem ATIS. Aby je odsłuchać, idź do menu SI → ATC w zasięgu, wybierz nasze lotnisko i sprawdź częstotliwość ATIS (powinna być 125,2 MHz). Wprowadź tę częstotliwość do COMM1 lub COMM2 (pamiętaj o przełączeniu częstotliwości na aktywną), wysłuchaj raportu ATIS i ustaw wysokościomierz na podane ciśnienie barometryczne.
Do utrzymywania wysokości, będziemy używać autopilota (patrz rys. 10.4 i 10.6), więc musi on również znać ciśnienie barometryczne. Aby to zrobić, kliknij przycisk BARO na autopilocie. Powinieneś zobaczyć wartość „29.92” – to jest aktualny nastaw ciśnienia atmosferycznego dla autopilota. Zanim wartość „29.92” zniknie (masz 3 sekundy), obróć dużym pokrętłem na autopilocie, aby zmienić tę wartość na prawidłową.
Jesteśmy gotowi do startu. Są jeszcze inne przygotowania, które powinniśmy zrobić, ale znowu, aby nie przytłaczać Cię, przekazuję jedynie minimalną ilość informacji, małymi strużkami. To prowadzi nas do najważniejszej kontroli jaką posiadasz – do klawisza p, który pauzuje symulację. Używaj go często, zwłaszcza gdy będziesz poznawał nowe rzeczy.
Dobra. Startuj, na razie utrzymując kurs 310°Startuj; wzbijaj utrzymując kurs pasa. Utrzymuj stałą prędkość wznoszenia. Planujemy wzbić się na 4000 ft. Jest jednak tylko jeden problem – te nie dobrze wyglądające chmury stoją nam na drodze.
Jeśli jest to Twój pierwszy lot IFR, to po wejściu w chmury możesz nie być w stanie latać. Kiedy wejdziesz w chmury, przez chwilę możesz być zaniepokojony brakiem wizualnych odniesień. „Nieważne” – możesz pomyśleć, „Będę po prostu utrzymywał stery stabilnie.” Jednak za kilka chwil możesz zauważyć, że tarcze i wskazówki przyrządów wariują i nie wiedząc o tym, możesz: lecieć do góry nogami, nurkować w kierunku ziemi lub przeciągniesz, albo wystąpią te wszystkie trzy rzeczy naraz.
Przyzwyczajenie się do latania bez zewnętrznych, wizualnych punktów odniesienia, wymaga praktyki, chociaż jest to umiejętność, którą zdecydowanie musisz opanować, jeśli chcesz latać IFR. Na razie jednak użyjemy autopilota, aby ułatwić tę część latania.
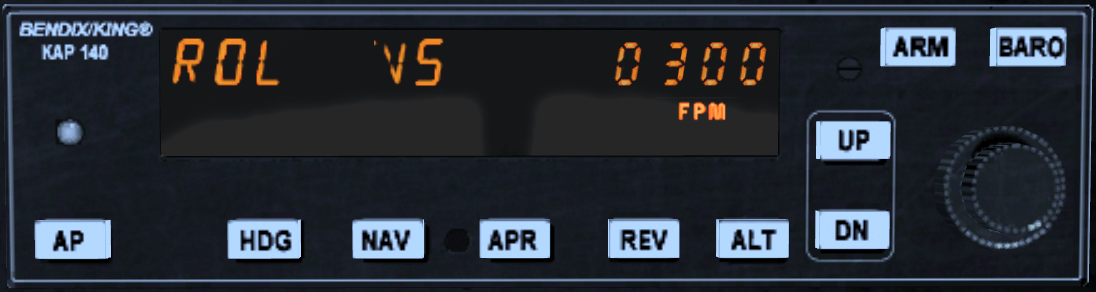
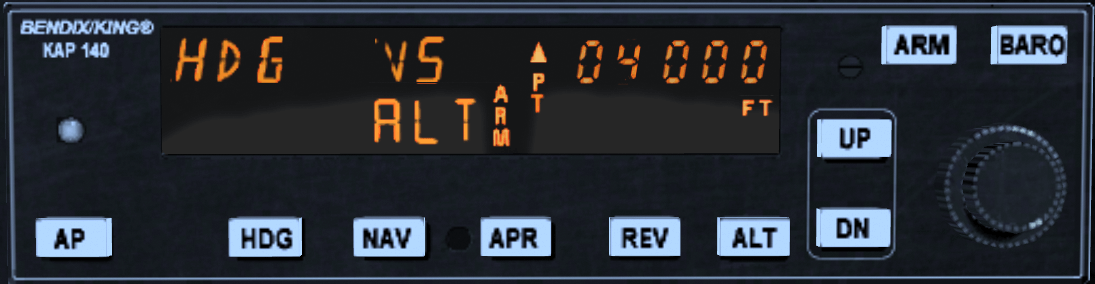
Po ustawieniu stałej prędkości wznoszenia i kursu, włącz autopilota, naciskając przycisk AP. Powinieneś zobaczyć „ROL” wyświetlony po lewej stronie, wskazujący, że autopilot jest w trybie roll (przechył) – utrzymuje poziom skrzydeł. W środku wyświetli się „VS”, wskazując, że włączony jest też tryb Vertical Speed – utrzymuje stałą prędkość pionową. Po prawej, chwilowo, wyświetli się wartość prędkości pionowej (w stopach na minutę). Początkową wartością jest prędkość pionowa jaka była w momencie włączenia autopilota. Przykładowo na rys. 10.6, mamy autopilot z ustawioną prędkością pionową 300 stóp na minutę.
Kiedy włączasz autopilota, SPRAWDŹ TO DOKŁADNIE. Może się zdarzyć, że włączysz autopilota w chwili, gdy miałeś irracjonalną prędkość wznoszenia, na przykład 1800 stóp na minutę. Nasza mała Cessna nie będzie mogła tego spełnić, a jeśli autopilot spróbuje to utrzymać (i to zrobi), przeciągniesz, zanim zdążysz powiedzieć „Ikar”.
Chcemy, aby prędkość pionowa wynosiła około 500 do 700 stóp na minutę. Naciśnij przyciski UP i DN (w górę i w dół), aby dostosować prędkość pionową do takich wartości. Weź również pod uwagę prędkość lotu. Chcemy zrównoważonego tempa wznoszenia.
Na
koniec,
gdy
już
ładnie
się
wznosisz,
naciśnij
przycisk
HDG
(heading).Włącz
autopilota;
ustaw
prędkość
pionową;
włącz HDG Na wyświetlaczu, napis „ROL” zmieni się na „HDG”, a autopilot wykona skręt,
aby śledzić wskaźnik heading, na żyroskopowym wskaźniku kursu. Ponieważ ustawiłeś
wskaźnik heading na kierunek pasa i wystartowałeś prosto (prawda?), zakręt nie powinien
być zbyt duży.
Do punktu przecięcia radiala 009 od VOR-a San Jose, jest około 8 nm, więc mamy trochę czasu. Ponieważ nie ma scenerii do podziwiania (patrz rys. 10.7), możemy przygotować się do następnej fazy lotu.
Jeśli spojrzysz na naszą trasę, zaraz po przecięciu radiala 009 i skręceniu na północ, miniemy punkt oznaczony MISON (aby przyjrzeć się bliżej tej części mapy, bez mojego pogrubienia linii trasy na niebiesko i zielono, zobacz rys. 10.8. MISON znajduje się w prawym dolnym rogu). Tuż nad i na lewo od MISON są dwie skrzyżowane strzałki. Oznacza to, że MISON jest skrzyżowaniem (intersection). Właściwie zamierzamy przelecieć na wschód od MISON, ale interesujący jest radial przechodzący z północnego zachodu na południowy wschód przez MISON (i naszą trasę). Użyjemy go do monitorowania naszych postępów.
Zwracanie uwagi na przejście przez ten radial nie jest absolutnie konieczne – możemy po prostu lecieć wzdłuż radiala 009 z San Jose, aż będziemy musieli skręcić. Jest to jednak przydatne z dwóch powodów: po pierwsze, dobrze jest wiedzieć dokładnie, gdzie jesteśmy, po drugie, potwierdza to, że jesteśmy tam, gdzie myślimy, że jesteśmy. Jeśli lecimy i lecimy i nie widać abyśmy przekroczyli radial, powinno być to dla nas ostrzeżenie.
Patrząc na mapę, widzimy, że radialem tym jest 114 z VORTAC Oakland (VOR TACAN, gdzie TACAN oznacza Taktyczny System Nawigacji Powietrznej). Częstotliwość Oakland to 116,8 a jej identyfikator to OAK (- - - . - - . - ). NAV2 powinien już być dostrojony do Oakland, ale jeśli nie, zrób to teraz.NAV2 ⇒116,8 Włącz NAV2 w panelu audio i upewnij się, że otrzymujesz poprawny identyfikator.
Dla VOR2 musimy dostosować radial, który nas interesuje, co robimy pokrętłem OBS. Ustaw OBS na 1146.VOR2 OBS ⇒114 Gdy przekroczymy radial 114, spróbuj odgadnąć czy flaga powinna wskazywać TO, czy FROM oraz czy igła przesunie się od lewej do prawej, czy od prawej do lewej.
Ostatnia uwaga: dla naszych celów, nie ma nic magicznego w radialu 114 – moglibyśmy użyć 113, 115, 100 lub 090. Powodem, dla którego wybrałem 114 jest to, że na mapie była już narysowana linia wzdłuż radiala 114, co oszczędziło mi trudu samodzielnego rysowania linii.
Lecąc w kierunku przecięcia radiala 009, przyjrzyjmy się bliżej autopilotowi. Po pierwsze, jeśli nie masz zwyczaju trymowania samolotu, prawdopodobnie zauważysz migające „PT” (Pitch Trim) ze strzałką w górę lub w dół na autopilocie. Oznacza to potrzebę wytrymowania samolotu, co też autopilot zrobi automatycznie za Ciebie. Strzałki oznaczają kierunek trymowania, strzałka w górę – nos w górę, w dół – nos w dół.
Po drugie, po prawej stronie autopilota, znajduje się duże pokrętło wyboru wysokości, za pomocą którego możemy ustawić docelową wysokość. Użyjmy go. Obracaj nim, aż zobaczysz pożądaną wysokość przelotową 4000 ft, wyświetlaną po prawej stronie. Kiedy zaczniesz obracać pokrętłem, na ekranie autopilota powinien pojawić się napis „ALT ARM” (jak na rys. 10.9). Oznacza to, że wybrałeś wysokość docelowąUstaw wysokość na autopilocie na 4000. Autopilot będzie utrzymywał aktualną prędkość wznoszenia aż do osiągnięcia tej wysokości. Wtedy wyrówna na 4000 ft i automatycznie przejdzie z trybu prędkości pionowej (VS) do trybu utrzymywania wysokości (ALT). Od teraz autopilot będzie utrzymywał stałą wysokość 4000 ft 7 . Gdy przekroczysz 3000 ft, autopilot wyda alarm dźwiękowy 5 razy, aby przypomnieć, że pozostało Ci 1000 ft do żądanej wysokości.
Nie zapominaj, że autopilot nie wyreguluje przepustnicy, więc gdy wyrówna na żądanej wysokości, to samolot przyspieszy, a obroty silnika wzrosną. Musisz wyregulować przepustnicę, aby uzyskać odpowiednią prędkość przelotową.
W pewnym momencie przetniesz radial 009 (igła VOR1 wycentruje się). Wtedy skręć na kurs 009.Skręć na 009° po przechwyceniu VOR1 Możesz to zrobić za pomocą wskaźnika heading na żyroskopowym wskaźniku kursu, jeśli używasz autopilota.
Jeśli nie masz szczęścia, igła prawdopodobnie nie będzie wyśrodkowana. Musimy dostosować nasz kurs. Igła CDI (pionowa igła na VOR) mówi nam, w którą stronę należy skręcić. Jeśli igła jest na lewo, to znaczy, że radial jest na lewo, więc musimy skręcić w lewo. Analogicznie gdy jest na prawo.
W teorii jest to dość łatwe, chociaż w praktyce może się okazać, że trudno jest utrzymać igłę w centrum i możesz lecieć slalomem wzdłuż radiala. Kluczem jest uświadomienie sobie tego: pozycja igły mówi nam, gdzie jesteśmy, ruch igły mówi nam, co zrobić.
Dokładniej mówiąc, jeśli igła jest po naszej lewej stronie, to tak, radial jest zdecydowanie po naszej lewej stronie8. Ale jeśli igła porusza się w naszym kierunku, oznacza to, że prędzej czy później przekroczymy radial, więc nasza sytuacja poprawia się i prawdopodobnie musimy tylko poczekać, aż igła się wycentruje. Z drugiej strony, jeśli igła oddala się, musimy zakręcić w jej stronę, aby zatrzymać ją i odwrócić jej ruch.
Zwróć uwagę, że wielkość zakrętu jaki trzeba wykonać, jest początkowo trudny do odgadnięcia, więc poeksperymentuj. Spróbuj 10°. Jeśli igła porusza się zbyt szybko, zmniejsz do 5° (tzn. cofnij o 5°). Natomiast jeśli igła porusza się zbyt wolno, zwiększ zakręt do 20° (tj. dodaj kolejne 10°) i zobacz, co się stanie.
Dodatkowe weryfikowanie swojej pozycji zawsze jest dobrą praktyką. Przecięcie z radialem Oakland 114 jest jedną z nich.Przetnij radial 114 od OAK Dalej znajduje się skrzyżowanie SUNOL. Jeśli przyjrzysz się uważnie, 5 różnych radiali łączy się w tym punkcie, więc mamy spory wybór. Ponieważ przyda się to później, użyjemy radiala pochodzącego z prawego górnego rogu. Kolejne sprawdzenie mapy pokazuje, że jest to radial 229 od VORTAC Manteca, 116,0 MHz , o identyfikatorze ECA (. - . - . . - ).
Powinieneś
już
wiedzieć
co
robić:
dostrój
NAV2
do
116,
ustaw
OBS
VOR2
na
229
i
sprawdź
identyfikator,
aby
potwierdzić
radiolatarnięNAV2
⇒
116,0
VOR2 OBS ⇒229.
Tymczasem zapoznajmy się z kolejnym elementem wyposażenia samolotu, który sprawdzi przelot przez SUNOL. Niektóre radiolatarnie VOR posiadają funkcję pomiaru odległości, zwaną DME (Distance Measuring Equipment)9. Takimi VOR-ami są, np. San Jose (pamiętaj, że to stacja VOR-DME), podobnie jak Oakland i Manteca (VORTAC również są wyposażone w DME).
Korzystając z DME, możesz dowiedzieć się, jak daleko jesteś, w linii prostej, od stacji VOR. W naszym scenariuszu DME nie jest konieczne, ale i tak go użyjemy, tylko po to, aby zobaczyć jak to działa i potwierdzić naszą pozycję.
DME to instrument znajdujący się pod autopilotem (patrz rys. 10.4). Upewnij się, że jest włączony. Selektor po lewej stronie włącznika/wyłącznika jest prawdopodobnie ustawiony na N1, gdzie N1 oznacza „słuchaj NAV1”. Ponieważ NAV1 jest dostrojony do San Jose, DME informuje nas o odległości do San Jose VOR-DME. Przełącz DME na N2DME ⇒N2 aby zobaczyć odległość do Manteca VOR.
DME pokazuje 3 rzeczy: odległość w milach morskich do radiolatarni, prędkość do lub od radiolatarni oraz szacowany czas dotarcia do radiolatarni przy obecnej prędkości. Zauważ, że odległość jest bezpośrednią odległością od Twojego samolotu do radiolatarni (zwaną „odległością skośną”), a nie odległością po ziemi. Pamiętaj również, że prędkość jest zależna od radiolatarni, więc jeśli nie lecisz bezpośrednio do lub z radiolatarni, prawdopodobnie będzie ona niższa niż Twoja prawdziwa prędkość względem ziemi. Na przykład, prędkość z VOR-a San Jose (który jest bezpośrednio za nami), powinna być większa niż prędkość w kierunku VOR-a Manteca, który jest po prawej stronie.
Jeśli wyszukamy informacje o punkcie SUNOL (np. z https://www.airnav.com/airspace/fix/SUNOL), dowiemy się, że znajduje się ono 33,35 nm (zmierzone przez odbiornik DME) od ECA na radialu 229,00 (to właśnie oznacza „ECAr229.00/33.35” (niestety VOR ECA już nie istnieje, dlatego nie zobaczymy tego w aktualnych informacjach o SUNOL – przyp. tłum.)).
Teraz mamy dwa sposoby potwierdzenia przecięcia SUNOL: igła VOR2 wycentruje się, a DME odczyta dystans około 33,4 nm. Zauważ, że DME nie zapewnia nam tutaj bardzo dokładnego pomiaru, ponieważ wysokość naszego samolotu tworzy kąt względem ziemi do radiolatarni Manteca. Ale daje nam to dobre ostrzeżenie o zbliżaniu się do SUNOL. Co więcej, jeśli odczytamy nieoczekiwaną wartość (np. 30 nm), powinno nas to zaalarmować, że coś jest nie tak.
Na panelu DME, między N1 i N2, mamy jeszcze jedno ustawienie, podpisane „HLD”. Jest to skrót od hold („utrzymuj”) i oznacza „utrzymuj bieżącą częstotliwość, niezależnie od tego, czy NAV1 albo NAV2 zostaną przestrojone”. Na przykład, jeśli teraz przełączymy się z N2 na HLD, DME będzie nadal wyświetlać (i aktualizować) informacje do Manteca, nawet jeśli zmienimy częstotliwość dla NAV2. Jest to przydatne, ponieważ zasadniczo reprezentuje trzeci niezależny odbiornik, a dla lotów IFR dwa odbiorniki nigdy nie wydają się wystarczające.
Lecąc radialem 009 z San Jose, zbliżamy się do SUNOL, monitorując naszą pozycję za pomocą DME. Będąc nad SUNOL mamy mniej niż 5 nm do Livermore, które jest gdzieś tam w dole pod chmurami. Może gdybyśmy po prostu zeszli do 700 ft lub coś koło tego (Livermore jest na 400, a podstawa chmur na 750) i skierowali się mniej więcej na północ od SUNOL, to czy dotarlibyśmy tam? To jest przepis na katastrofę, przyjacielu, i wiesz o tym.
Jak pamiętasz z poprzedniego poradnika, podczas lotu VFR nie kierujesz samolotu po prostu na najbliższy pas startowy, aby wylądować. Musisz dostosować się do kręgu nadlotniskowego. Pomaga to ustawić się w osi pasa i zapobiega zderzaniu się samolotów ze sobą, co jest dobrą rzeczą.
Podobnie jest z lądowaniami IFR. Tutaj też mamy procedurę, której musimy się trzymać. A w zasadzie procedury. Ze względu na złożoność lądowania w warunkach IFR, nie ma jednej procedury dla wszystkich lotnisk. Musisz sprawdzić swoje lotnisko. W rzeczywistości zwykle musisz sprawdzić swoje lotnisko, pas startowy i sprzęt nawigacyjny.
Nasze lotnisko to Livermore (KLVK). Sprawdźmy informacje dla tego lotniska. Wejdź na https://www.airnav.com/airport/KLVK, aby zobaczyć jakie podejścia oferuje. Na dole mamy IAP (Instrument Approach Procedure). Istnieją trzy podejścia dla pasa startowego 25R. Pierwsze to podejście ILS (Instrument Landing System), drugie to podejście GPS (Global Positioning System) i trzecie LOC (Localizer). Dla tego poradnika wybierzmy podejście ILS (które wyjaśnię później).
Chociaż Livermore ma tylko trzy różne procedury podejścia według przyrządów, duże lotniska mają o wiele więcej. Jeśli spojrzysz na pobliskie San Francisco, zobaczysz, że ma masę procedur. Są procedury ILS, procedury GPS, procedury LDA, procedury VOR i wiele więcej. Nie zdziwiłbym się, gdyby mieli tam procedurę dla kogoś z sekstansem i klepsydrą. Aby nauczyć się lotu IFR, musisz opanować je wszystkie.
Wróćmy do Livermore. Jeśli pobierzesz plik PDF z procedurą, zobaczysz coś takiego jak na rys. 10.10 (z wyjątkiem kolorów). Wydaje się to dość przytłaczające – mamy tam skompresowanych wiele informacji na małej przestrzeni. Zignorujemy tyle, ile się da, ograniczając się do trzech części, które pokolorowałem. I przerobimy te części na zasadzie „potrzebnej wiedzy” – przyjrzymy się im tylko wtedy, gdy naprawdę będzie taka potrzeba.
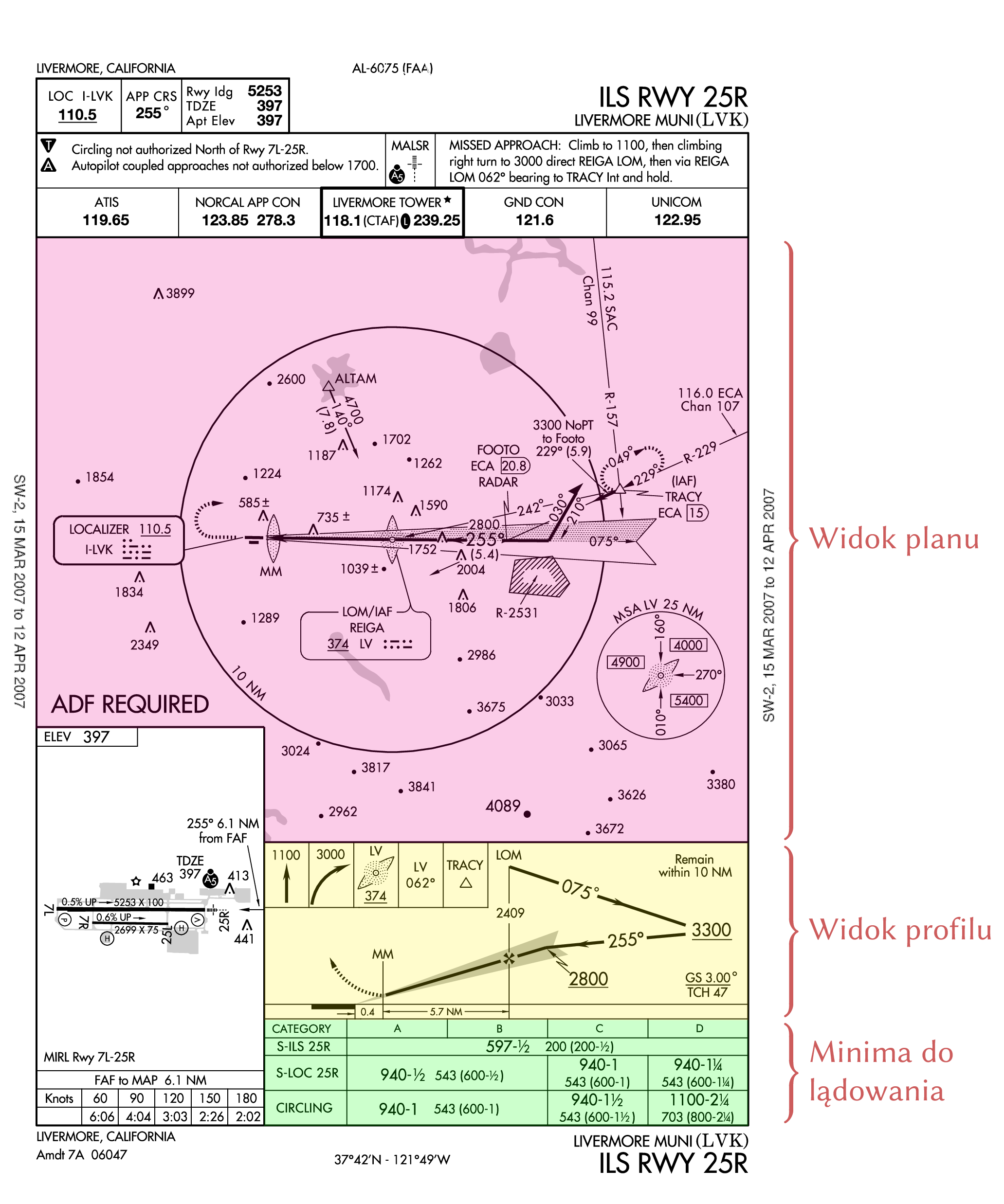
Gdzie zacząć? Oczywiście od początku. IAP będzie mieć jednen lub więcej punktów zwanych IAF (Initial Approach Fix). To są punkty rozpoczęcia procedury podejścia i można je znaleźć w „widoku planu”, pokolorowanym na różowo – rys. 10.10. Nasz IAP ma dwa takie punkty, jeden pośrodku i jeden po prawej (patrz rys. 10.11).
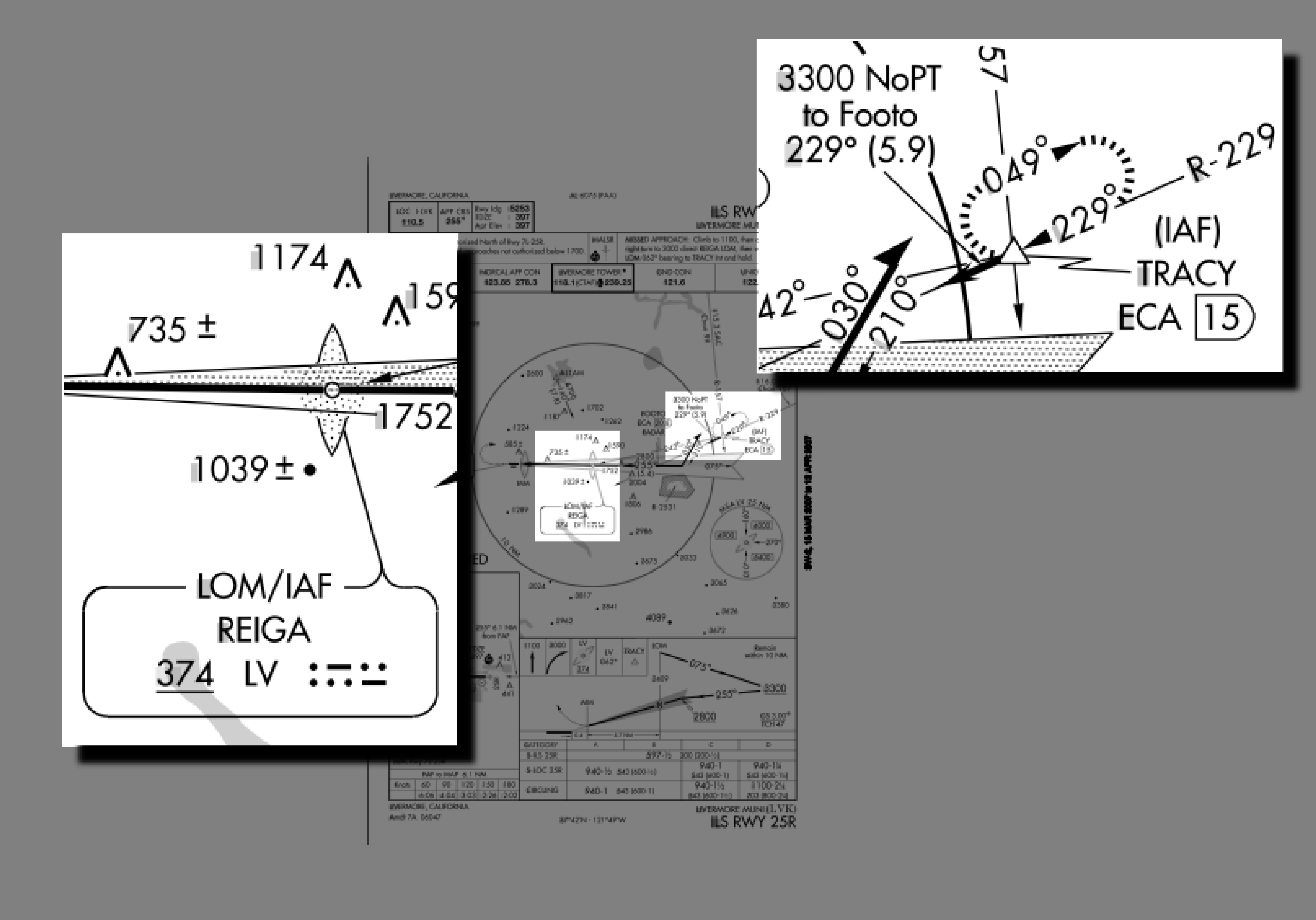
IAF to fix, a fix to identyfikowalny punkt w przestrzeni. W rzeczywistości napotkaliśmy już inny rodzaj fixa, a mianowicie skrzyżowanie VOR. Fixy również mają swoje nazwy (np. MISON, SUNOL). IAF po prawej nosi nazwę TRACY i składa się z radiala, odległości i wysokości. W szczególności jest to 15 DME (15 nm mierzone przez odbiornik DME) wzdłuż radiala 229 od VOR-a ECA (tj. Manteca).
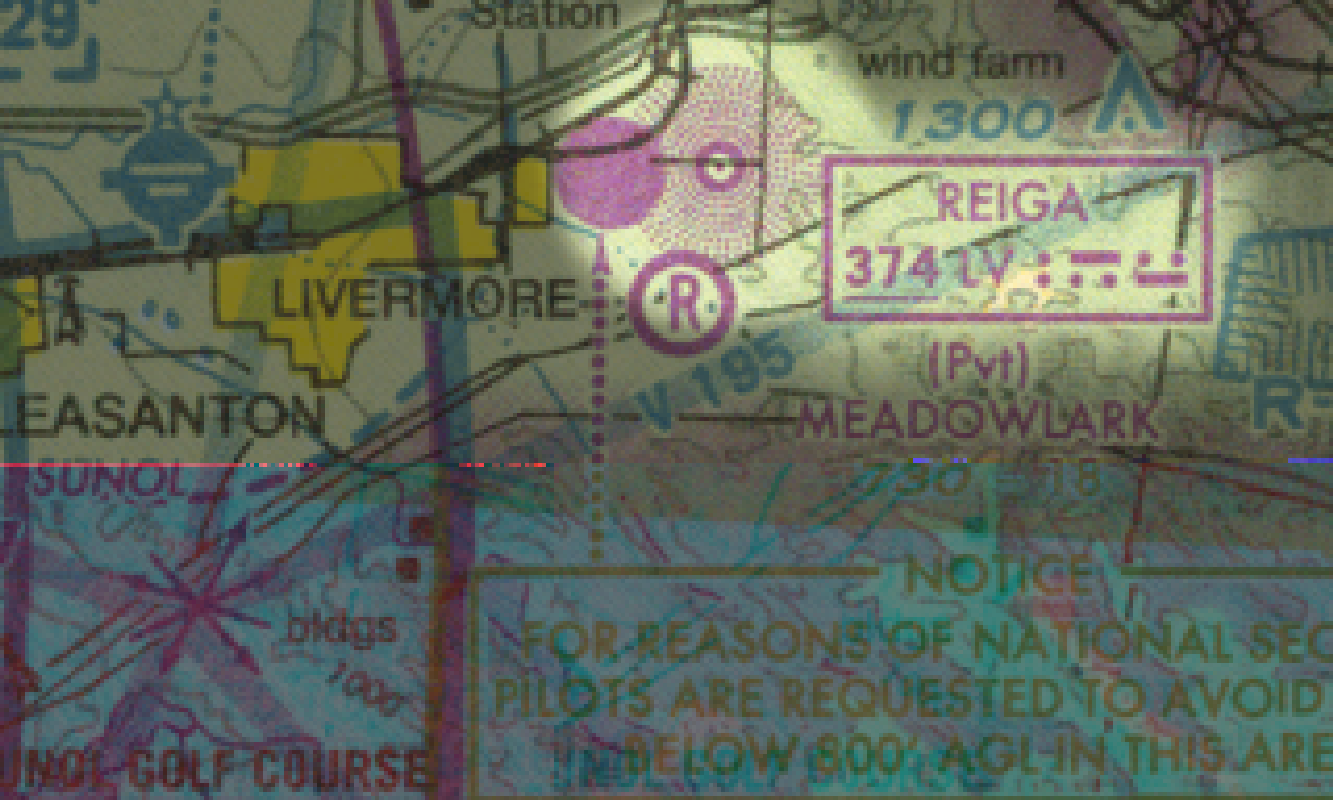
Jednak nie użyjemy TRACY jako naszego IAF. Użyjemy IAF tego na środku mapy, który jest jednocześnie zewnętrznym markerem (LOM – Locator Outer Marker). Tym, czym jest zewnętrzny marker, będziemy się martwić później. Na razie skoncentrujmy się na samym lokalizatorze w LOM, a jest nim NDB (Non-Directional Beacon)10. NDB podobnie jak VOR, jest używany do określania kierunku i nawigacji z jednego miejsca w drugie. Podobnie jak VOR, ma także nazwę (w tym przypadku REIGA), częstotliwość (374 kHz) i identyfikator (LV lub . - . . . . . - alfabetem Morse’a). NDB zaznaczone są także na mapach lotniczych, jako drobne, rozmyte czerwone kółka z małym kołem pośrodku, a ich dane identyfikacyjne umieszczone są w czerwonym polu obok (patrz rys. 10.12. Nie pomyl rozmytego oznaczenia NDB, z wypełnionym czerwonym kołem po lewej stronie, ani z kołem poniżej z literą „R” w środku).
Stacja NDB w zasadzie nadaje sygnał, który mówi „jestem tutaj”, a odbiornik w samolocie może odebrać ten sygnał i powiedzieć pilotowi „stacja jest tam”. Wystarczy dostroić odbiornik i monitorować właściwe instrumenty. Odbiornik, oznaczony jako ADF (Automatic Direction Finder) i odpowiadający mu przyrząd, również oznaczony jako ADF, pokazano na rysunku 10.4.
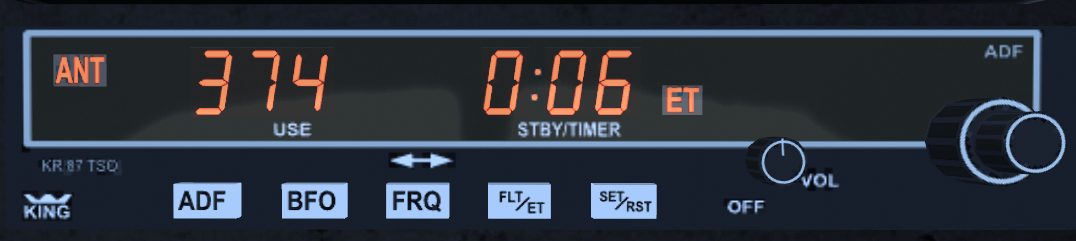
Aby dostroić się do REIGA, przekręć pokrętła strojenia na odbiorniku ADF, aż wyświetli się 374 jako częstotliwość zapasowa (STDBY)ADF ⇒374. Użyj dużego pokrętła aby zmienić częstotliwość co 100 kHz oraz małego pokrętła aby zmienić częstotliwość co 1 kHz. Dodatkowo, jak zawsze, możesz przytrzymać klawisz Shift aby zwiększyć skok, odpowiednio co 600 kHz dla dużego pokrętła i co 10 kHz dla małego pokrętła. Następnie naciśnij przycisk FRQ podmiany częstotliwości. Teraz 374 jest wyświetlana jako wybrana częstotliwość (USE). Wskazówka na przyrządzie ADF powinna się obrócić w prawo wskazując kierunek do REIGA. Ale może nie. Czemu? Ponieważ odbiornik może być w trybie antenowym (co pokazuje napis „ANT” w lewej górnej części wyświetlacza)11. Jeśli jest w trybie antenowym, naciśnij przycisk ADF, aby wyświetlił się napis „ADF”. Teraz wskazówka powinna się obrócić, wskazując kierunek na REIGA. Podobnie jak dla VOR-ów, aby mieć pewność, że naprawdę jesteśmy dostrojeni do właściwej radiolatarni, musimy również odsłuchać identyfikator w kodzie Morse’a, więc naciśnij przełącznik ADF na panelu audio i sprawdź.
Zauważ, że przyrząd ADF nie ma pokrętła OBS – wskazówka po prostu wskazuje radiolatarnię. To prowadzi nas do naszej pierwszej reguły dla ADF:
1. Reguła ADF:
Wskazówka wskazuje na radiolatarnię.
To bardzo proste. W rzeczywistości możesz uważać, że nie zasługuje to na „regułę”, ale chcę podkreślić różnicę między ADF i VOR. Pamiętaj, że VOR śledzi pojedynczy radial, który określasz obracając pokrętłem OBS. ADF ma pokrętło i identycznie wyglądającą tarczę kompasu, więc można pomyśleć, że działa w ten sam sposób co VOR. Ale tak nie jest. Przekręć pokrętło headingu dla ADF (oznaczone jako „HDG”) i zobacz, co się stanie. Tarcza kompasu się porusza, ale wskazówka nie. Po prostu wskazówka zawsze wskazuje na radiolatarnię.
W naszej obecnej sytuacji, gdy chcemy po prostu lecieć do REIGA, to wszystko, co musimy wiedzieć, aby korzystać z ADF. Jeśli wskazówka wskazuje leć „tam”, to polecimy „tam” i w końcu przelecimy nad REIGA. Jednak ze względu na praktykę i ponieważ będzie to konieczne później, podam drugą regułę dla ADF-a, która wyjaśnia do czego służy obrotowa tarcza kompasu:
2. Reguła ADF:
Jeśli tarcza kompasu odzwierciedla nasz aktualny kurs, to wskazówka podaje kurs do radiolatarni.
Innymi słowy, tarcza kompasu mówi „tam”, ale w liczbach.
Teraz jesteśmy gotowi wyruszyć do REIGA. Obracaj pokrętłem heading ADF, aż nasz aktualny kurs znajdzie się na górze (w zasadzie tarcza ADF powinna pokrywać się z żyroskopowym wskaźnikiem kursu). Kiedy miniemy skrzyżowanie SUNOL, spójrz na wskazówkę ADF i ustaw wskaźnik heading (na żyroskopowym wskaźniku kursu) na ten sam kurs co wskazuje ADF (zakładam, że używasz autopilota. Jeśli nie, po prostu skręć na ten kurs). Pod koniec zakrętu, wskazówka ADF powinna być skierowana pionowo w górę.Miń SUNOL; skręć na REIGA A jeśli tak nie jest, dostosuj kierunek w taki sposób, aby tak było12.
Nawiasem mówiąc, im bliżej będziesz REIGA, tym wskazówka stanie się bardziej wrażliwa na zmiany kursu. Nie wariuj, próbując utrzymać wskazówkę na środku, gdy się zbliżysz. Utrzymuj stały kurs i przygotuj się na…
Więc kiedy już dotrzemy do REIGA, to czy po prostu zakręcimy w lewo i skierujemy się na pas startowy? Ach, gdyby życie było takie proste. Nie, skręcimy w prawo, oddalając się od lotniska i wykonamy zakręt proceduralny. Wiemy, że musimy wykonać zakręt proceduralny dzięki zadziornej strzałce na mapie (patrz rys. 10.13). Jak widać, podążając za strzałką, musimy odlecieć kursem 075°, a następnie skręcić w lewo o 45° na kurs 030°. Następnie zawrócimy (w prawo, z dala od lotniska – to jedna z zasad dotyczących zakrętów proceduralnych), tak aby wykręcić na kurs 210°, a następnie skręcimy o 45° w prawo na kurs 255 ° , kierując się prosto na pas startowy. Całe to zakręcanie daje nam czas na właściwe ustawienie się na kursie, na odpowiedniej wysokości, aby wylądować na pasie 25R.
Hmmm. Wspomniałem o „odpowiedniej wysokości”, ale skąd mamy wiedzieć, jaka to jest? Wysokości mamy podane w widoku profilu na mapie (żółta część na rys. 10.10). Widać, że na górze jest LOM, nasz IAF. Teraz podążaj za strzałkami. Po IAF ruszamy na kurs 075°. Podczas zakrętu proceduralnego możemy zejść do 3300 ft, ale nie niżej (to właśnie oznacza linia pod 3300). Po zakończeniu zakrętu proceduralnego i powrocie na kurs 255° możemy zejść do 2800 ft, ale nie niżej, aż przetniemy ścieżkę schodzenia.
Jedną z rzeczy, które nie mówi procedura podejścia wg instumentów, jest długość zakrętu proceduralnego. Jedynym ograniczeniem jest to, że nie możesz lecieć dalej niż 10 nm od NDB. Zauważ, że wokół niego narysowany jest okrąg o długości 10 mil morskich oraz w widoku profilu na mapie mamy napisane „Remain within 10 NM” („Pozostań w promieniu 10 mil morskich”). Nie żartują. Tak więc, ponieważ lecimy z prędkością około 110 węzłów, dwie minuty na każdy etap są rozsądne – dwie minuty lecąc kursem 075° i dwie minuty lecąc kursem 030°. W drodze powrotnej już nie obchodzi nas czas – po prostu chcemy przechwycić kurs 255°.
Tak więc po minięciu REIGA skręć w prawo na kurs 075°. Nasz odbiornik ADF ma wbudowany zegar, więc użyjemy go do odmierzenia czasu naszych dwuminutowych etapów. Naciśnij przycisk FLT/ET (flight time/elapsed time – „czas lotu/upływający czas”). Napis „FRQ” na środku wyświetlacza zniknie, po prawej stronie pojawi się „FLT”, a częstotliwość zapasowa zostanie zastąpiona czasem. Jest to całkowity czas lotu i nie można go zmienić, chyba że wyłączysz zasilanie. Ponownie naciśnij przycisk FLT/ET. Teraz wyświetli się „ET” (Elapsed Time) i licznik czasu, prawdopodobnie taki sam jak czas lotu. Aby zresetować upływający czas, naciśnij następny przycisk, oznaczony SET/RST. Licznik powinien zresetować się do 0, a następnie rozpocząć odliczanie w górę (patrz rys. 10.14)13. Za każdym razem, gdy naciśniesz przycisk SET/RST, czas „ET” zresetuje się. Jeśli chcesz ponownie zobaczyć częstotliwość zapasową, naciśnij przycisk FRQ. Stopery będą nadal działać.
Kiedy
zbliżyliśmy
się
do
REIGA,
nie
przejmowaliśmy
się
specjalnie
naszym
kursem
–
po
prostu
celowaliśmy
w
REIGA.
Teraz
jednak
nasz
kurs
jest
ważny.
Chcemy
lecieć
bezpośrednio
od
REIGA
na
kursie
075
°
Miń
REIGA;
Leć kursem 075° od REIGA przez 2 minuty.
Teraz, w idealnym świecie, po przejściu na kurs 075° wskazówka ADF byłaby skierowana bezpośrednio w dół (tj. bylibyśmy na kursie). Prawdopodobnie tak nie jest, więc musimy dostosować nasz kurs. Kluczem do dostosowania naszego kursu jest druga Reguła ADF. Jeśli poprawnie ustawiliśmy tarczę kompasu ADF, wskazówka pokazuje nam aktualny kurs na NDB. Jeśli skręcimy i polecimy, aż przetniemy kurs 255, a następnie skręcimy na 075°, będziemy na właściwym kursie.
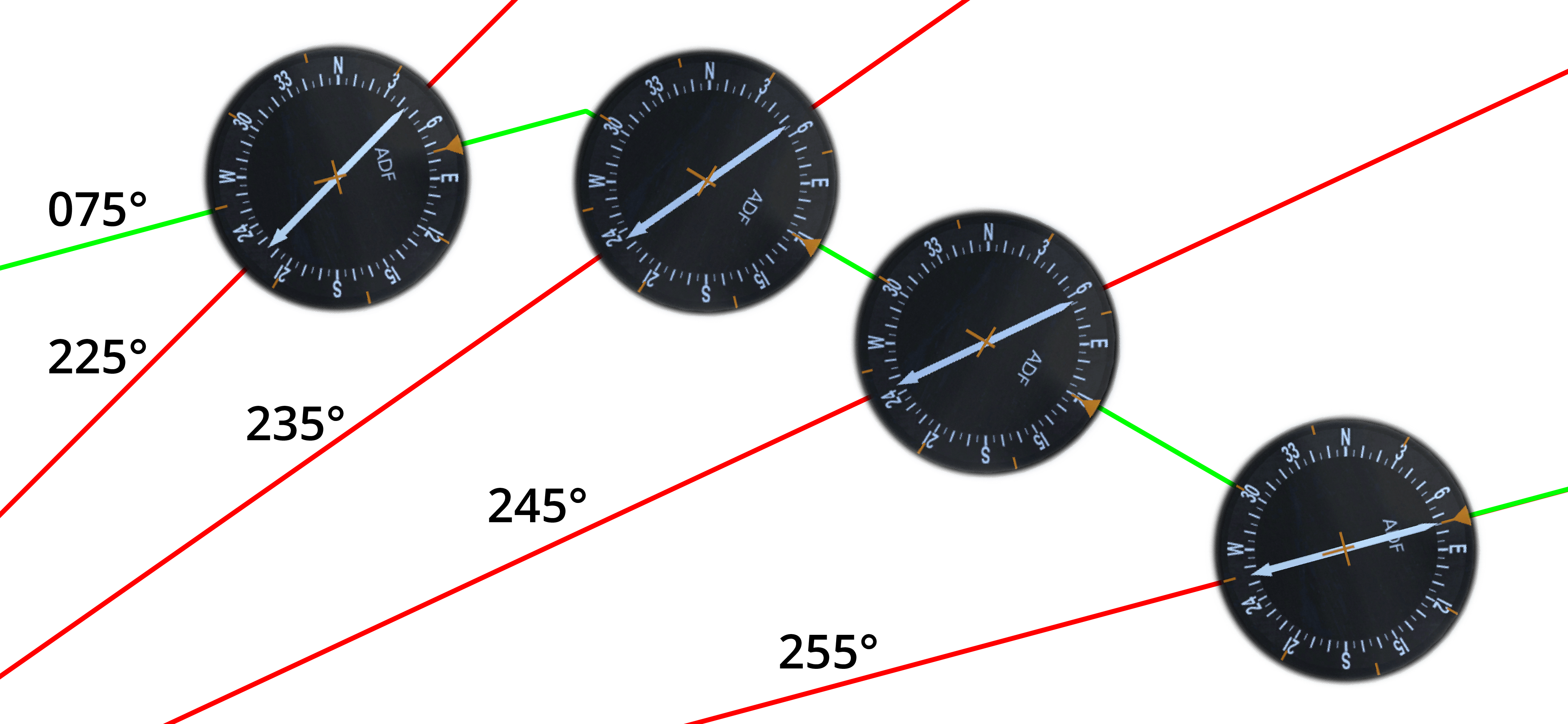
Rysunek 10.15 pokazuje, o co mi chodzi. Mamy tam samolot, który lecąc wzdłuż zielonej linii początkowo zszedł z kursu14. Kurs jest poprawny – 075°, ale NDB znajduje się na 225°, a nie na 255°. Aby to poprawić, skręcamy w prawo (pamiętając o dostosowaniu tarczy kompasu ADF do naszego nowego kursu). Lecąc tym nowym kursem, zbliżamy się do właściwej pozycji, przecinając radiale 235 i 245 (zaznaczone na czerwono). Wreszcie, kiedy wskazówka ADF pokazuje 255°, skręcamy w lewo na 075° i ponownie dostosowujemy tarczę kompasu ADF15. Jesteśmy teraz na kursie.
Oczywiście, nawet gdy wrócisz na właściwe tory, to nie będzie koniec historii. Twój samolot dryfuje; Twój umysł dryfuje; Twój kompas dryfuje; wiatr Cię spycha. Odkrywasz, że będziesz ciągle wprowadzał drobne poprawki. To jest w porządku, o ile jesteśmy blisko. W każdym bądź razie, niedługo (właściwie po dwóch minutach), skręcimy w lewo o 45° na kurs 030 ° w ramach naszego zakrętu proceduralnego, po czym po prostu zignorujemy NDB. Westchnienie. Cały ten wysiłek dla zaledwie dwóch minut. Nie wydaje się to tego warte.
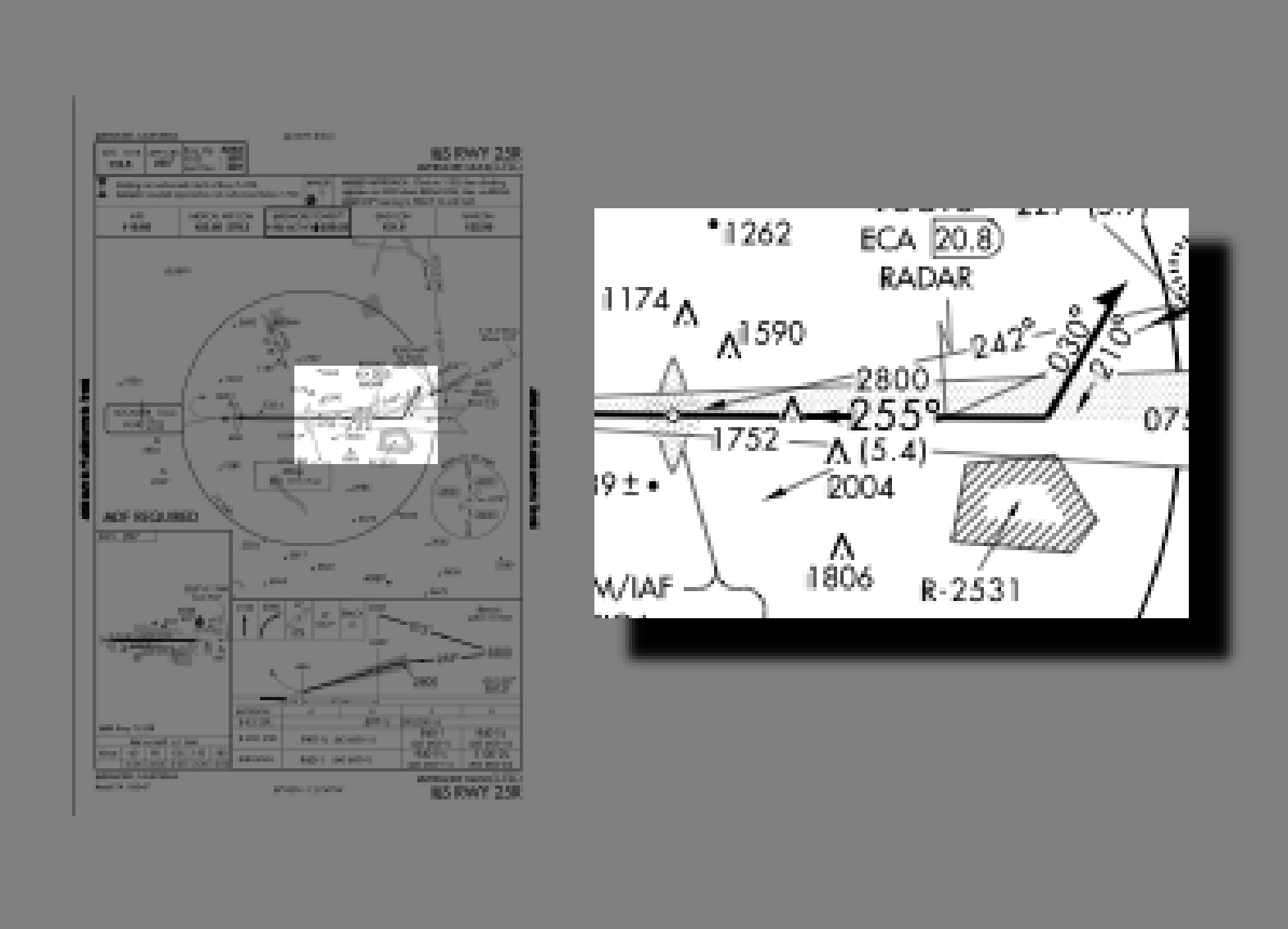
Kiedy lecisz od lotniska, spójrz od czasu do czasu na VOR2, dostrojony do Manteca i DME. Zakładając, że OBS jest nadal ustawiony na 229, a DME wciąż jest dostrojony do N2, w pewnym momencie wskazówka powinna wyśrodkować się, co oznacza, że przekroczyłeś radial 229, a jeśli jesteś na kursie, w tym samym czasie DME powinno pokazać 20,8. Skąd mamy to wiedzieć? Jeśli spojrzysz na mapę podejścia (rys. 10.10), zauważysz skrzyżowanie o nazwie FOOTO. Jest ono na ścieżce podejścia i jest w odległości 20,8 DME od ECA. Chociaż to skrzyżowanie nie jest dla nas bezwzględnie konieczne, przychodzi za darmo i stanowi dobre potwierdzenie naszej pozycji zarówno w locie od i do lotniska.
W zależności od tego, jak szybko lecisz, prawdopodobnie miniesz FOOTO w momencie, gdy upłyną dwie minuty na kursie 075°. Po dwóch minutach skręć w lewo o 45° na kurs 030°. Zresetuj stoper i leć przez kolejne dwie minuty tym kursem.
Ten
etap
jest
stosunkowo
bezproblemowy,
więc
wykorzystamy
chwilę
spokoju,
aby
zejść
do
3300
ft
.Skręć
w
lewo
na
030
°
;
leć przez 2 min. i zniżaj do 3300 Przed zniżaniem sprawdź ATIS dla lotniska KLVK (powinien być na
częstotliwości 119,65 MHz) i upewnij się, że masz prawidłowo ustawione ciśnienie
atmosferyczne na wysokościomierzu.
Zakładając, że używasz autopilota, będziesz musiał zrobić kilka rzeczy, aby zniżyć lot:
Zwróć uwagę, że jeśli używasz autopilota do zniżania, po prostu opuści on nos, jak zły pilot, więc samolot przyspieszy. Chcemy zniżać, ale nie chcemy przyspieszać, więc musimy zmniejszyć obroty silnika, aby utrzymać prędkość 110 węzłów. Później, kiedy osiągniesz poziom 3300 ft, będziesz musiał ponownie zwiększyć moc.
Jeśli sterujesz ręcznie, wystarczy wyregulować silnik, aby uzyskać żądaną prędkość zniżania – samolot powinien magicznie utrzymać 110 węzłów, jeśli jest już wytrymowany na 110 węzłów.
Podczas schodzenia musimy też zacząć się zastanawiać, w jaki sposób przechwycić kurs 255° w drodze powrotnej i skierować się na pas. Można by pomyśleć, że użyjemy NDB tak, jak zrobiliśmy to na odcinku od lotniska, ale w tym momencie NDB nie jest wystarczająco dobry. Zamiast tego użyjemy lądowania ILS, tak zwane lądowanie „precyzyjne”. NDB nie jest wystarczająco precyzyjny – może nas doprowadzić do pasa, ale nie wystarczająco dokładnie.
Więc przejdziemy na nasz system ILS. Jest znacznie dokładniejszy w poziomie. Ponadto oferuje naprowadzanie pionowe, czego NDB w ogóle nie posiada. I hej, daje to nam również coś nowego do nauczenia się w ciągu kilku pozostałych minut, abyśmy się nie nudzili.
Podobnie jak w przypadku nawigacji NDB i VOR, system ILS16 ma nadajnik (lub nadajniki – lokalizator oraz ścieżkę schodzenia (Glide Slope)) na ziemi oraz odbiornik i wskaźnik w samolocie. Okazuje się, że odbiornik to po prostu odbiornik NAV, których mamy dwa. Wskaźnik to ten sam wskaźnik co VOR, ale ma dodatkową wskazówkę ścieżki schodzenia, która jest poziomą (miejmy nadzieję) igłą. Pionowa igła, podobnie jak dla VOR-a, pokazuje, czy jesteś na prawidłowym radialu. Pozioma igła pokazuje, czy jesteś na prawidłowej wysokości na ścieżce schodzenia. Nasz wskaźnik ILS to nasz stary przyjaciel VOR1.
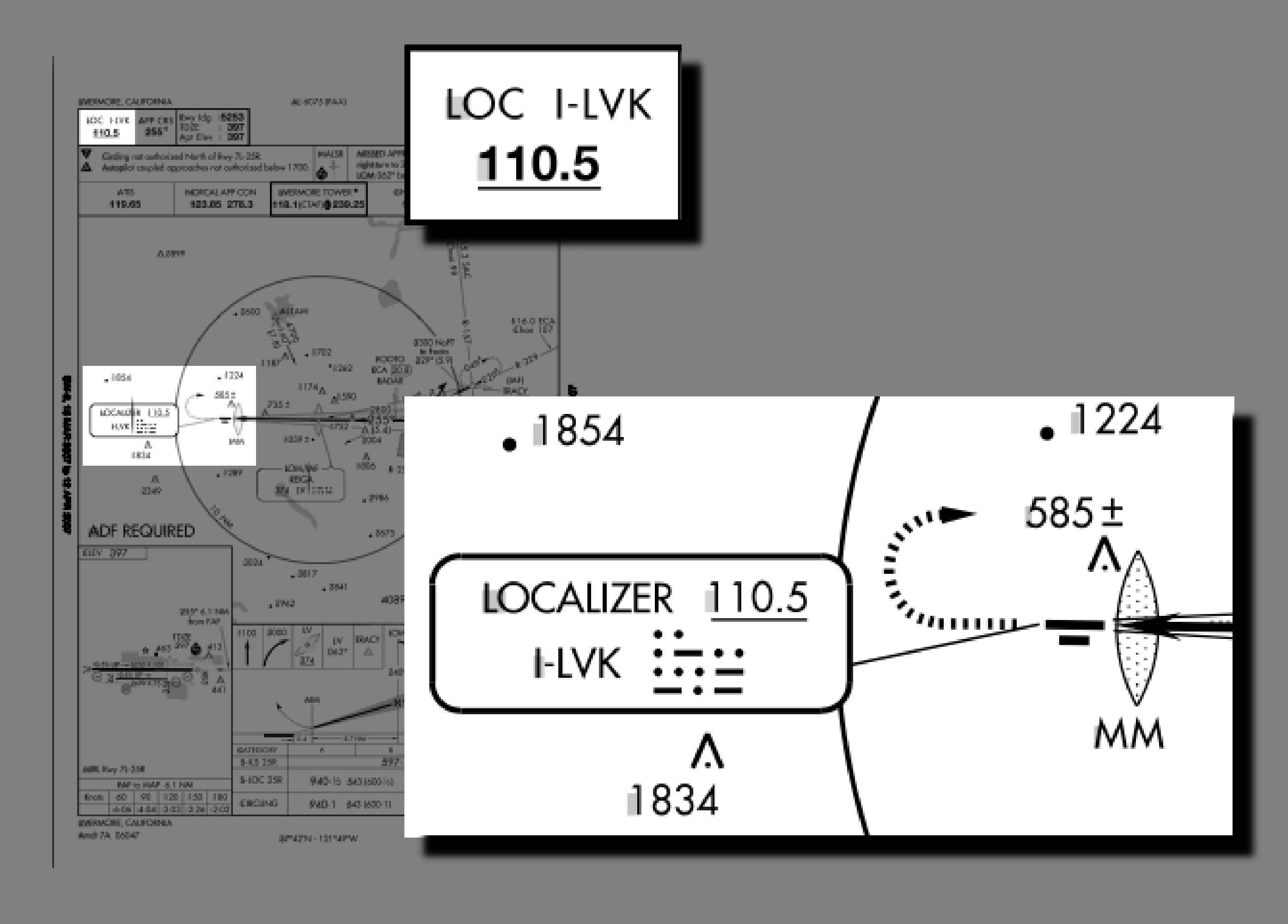
Jak można się domyślić, lokalizator ma ustaloną częstotliwość i identyfikator (nie ma potrzeby osobnego dostrajania ścieżki schodzenia. Jeśli dostroisz lokalizator, dostroiłeś jednocześnie ścieżkę schodzenia). Jest to pokazane na mapie podejścia w dwóch miejscach: w lewym górnym rogu i w widoku z góry przy pasie startowym (patrz rys. 10.16). Jak widać, częstotliwość to 110,5 MHz, a identyfikator to I-LVK (. . . - . . . . . - - . - ).
Jeśli spojrzysz teraz na VOR1, powinien pokazywać czerwoną flagę „GS” (można to zobaczyć na rys. 10.5). Pokazuje to, że nie ma sygnału ścieżki schodzenia. Teraz dostrój NAV1 do 110,5NAV1 ⇒110,5. Czerwona flaga „GS” powinna zniknąć. Sprawdź identyfikator. Brzmi cudownie, prawda? Ten lokalizator wyciągnie Cię z tej niekończącej się, gęstej zupy. Kiedy dostroisz się do lokalizatora, zauważysz również, że igły ILS się poruszą. A OBS? Cóż, jest bezużyteczny. Spróbuj go przekręcić. Bez względu na to, jak go przekręcisz, igły nie poruszą się w odpowiedzi. Tak to jest zaprojektowane. Lokalizator jest w zasadzie VOR-em z jednym radialem – kursem podejścia. Nie zależy nam na innych radialach, więc nie potrzebujemy OBS-a, aby deklarować zainteresowanie innym radialem. Jednak posłuży nam jako przydatne przypomnienie, więc przekręć OBS na kurs 255, naszego pożądanego kursu na pasVOR1 OBS ⇒255.
Jesteśmy teraz gotowi do przechwycenia lokalizatora ILS. Po upływie dwóch minut na kursie 030 ° zawróć w prawo na kurs 210°Skręć w prawo o 180° na 210°. Wkrótce po zakończeniu zakrętu, pionowa igła lokalizatora na ILS, zacznie się poruszać. I będzie poruszała się szybko, znacznie szybciej niż robiły to wskazówki ADF-a i VOR-aPrzechwytywania lokalizatora. Lokalizator jest 4 razy bardziej czuły niż VOR, stosunkowo niewielkie ruchy samolotu powodują duże zmiany w odchyleniu igły. Prawdopodobnie przesadzisz z zakrętem, ale nie martw się, ponieważ mamy około 5 lub 10 minut, aby wszystko wyprostować.
Tylko pamiętaj: nie goń za igłami. Ta mantra jest teraz ważniejsza niż kiedykolwiek. Te igły są wrażliwe – jeśli po prostu skręcisz w lewo, gdy igła lokalizatora znajduje się na lewo, i w prawo, gdy jest na prawo, będziesz latał jak pijany marynarz. Jeśli masz szczęście, trafisz na pas, gdy po raz kolejny będziesz przecinał prawidłową ścieżkę. Jednak szczęście to coś, na czym nie powinniśmy polegać. Dlatego przed wykonaniem ruchu ustal, jak poruszają się igły.
Teraz, gdy wracasz z powrotem na kurs 255°, zwolnij do 75 węzłów, wysuń trochę klapy i zniżaj do 2800 ft (ale nie niżej)Zwolnij do 75 węzłów; wysuń klapy; zejdź do 2800. I sprawdź czy przelatujesz nad FOOTO, aby potwierdzić swoją pozycję. I poklep się po głowie i pomasuj brzuch.
Kiedy lecisz w kierunku pasa startowego, nie zapomnij spojrzeć na poziomą igłę – igłę ścieżki schodzenia. Kiedy przechwyciliśmy lokalizator, igła pozioma powinna być wysoko nad nami, ponieważ tak naprawdę byliśmy pod ścieżką schodzenia. Gdy wyrównaliśmy poziom lotu na 2800 ft, ścieżka schodzenia zaczęła „opadać” w naszą stronę. W końcu powinieneś zobaczyć, jak igła zaczyna się przesuwać w dół. Kiedy igła jest ustawiona poziomo w centrum, oznacza to, że jesteś na ścieżce schodzenia17. I wkrótce po przechwyceniu ścieżki schodzenia powinniśmy przelecieć nad zewnętrznym markerem (Outer Marker). Teraz kilka rzeczy wydarzy się mniej więcej jednocześnie, z których wszystkie potwierdzą naszą pozycję:
Będąc
na
ścieżce
schodzenia
musimy
zacząć
zniżać.
Jakie
jest
dobre
tempo
zniżania?
To
zależy
od
naszej
prędkości
względem
ziemi.
W
naszym
przypadku
lecimy
z
prędkością
75 węzłów
(prawie
nie
ma
wiatru,
więc
nasza
prędkość
względem
powietrza
i
prędkość
względem
ziemi
są
takie
same)
i
okazuje
się,
że
musimy
zniżać
z
prędkością
około
400 stóp
na
minutę.
Z autopilotem
jest
to
całkiem
proste
–
po
prostu
w
trybie
„VS”
wybierz
-400
i
gotowe
(ale
pamiętaj
o
zmniejszeniu
mocy
silnika,
aby
utrzymać
prędkość
75 węzłów,
albo
uderzysz
w
pas
dość
szybko
oraz
przygotuj
się
na
zmianę
prędkości
pionowej,
jeśli
dryfujesz
powyżej
lub
poniżej
ścieżki
schodzenia).Przechwyć
ścieżkę
schodzenia;
miń
marker
zewnętrzny;
wysuń klapy na drugi ząbek
Bez autopilota jest to również całkiem proste – wystarczy zmniejszyć moc. Na ile? W naszym przypadku lecąc Cessną, będzie to na około 1700 obr./min. Ponownie, zależy to od wielu rzeczy – samolotu, wysokości, wiatru, wagi itd., więc będziesz musiał dostosować inaczej, jeśli zobaczysz, że igła ścieżki schodzenia zacznie się poruszać w górę lub w dół. Podobnie jak dla igły lokalizatora… (czy jesteś gotowy?) NIE GOŃ JEJ. Obserwuj, jak się porusza, a następnie dokonaj poprawek.
Ponieważ jesteśmy na końcowym podejściu, możesz chcieć wysunąć klapy na drugi ząbek. Wpłynie to na Twoje trymowanie, a także będziesz musiał trochę dostosować moc.
Po tych wszystkich ekscytacjach związanych z procedurą, będzie się wydawać, że po minięciu zewnętrznego markera, droga do pasa startowego jest długa. Nie ma wiele do roboty, tylko wpatrywanie się w igły ILS-a. W rzeczywistości prawdopodobnie będziesz się na nie patrzeć, jak nigdy wcześniej. Rozejrzyj się też po innych wskaźnikach – mają przydatne rzeczy do powiedzenia. Czy nasza prędkość lotu jest w porządku? Nie chcemy przeciągnąć. RPM jest prawidłowe? Jeśli sterujesz ręcznie, będziesz potrzebował stale sprawdzać sztuczny horyzont i żyroskopowy wskaźnik kursu. Ponieważ jest to symulator, nie musimy się martwić o ciśnienie oleju i temperaturę silnika, ale i tak warto tam zajrzeć, aby nabrać nawyku. I mam nadzieję, że zrobiłeś takie rzeczy, jak ustawienie mieszanki na w pełni bogatą (zuborzyłeś ją w fazie przelotu, prawda?). Jeśli chcesz, możesz całkowicie opuścić klapy, gdy będziesz już bliżej pasa.
Właściwie sprawiłem, że wykonałeś więcej pracy, niż musiałeś. Używaliśmy autopilota jako fantazyjnej kierownicy, ale jest on zdolny do czegoś więcej. Być może zauważyłeś, że autopilot ma kilka przycisków, których nie wyjaśniłem – NAV, APR i REV. A oto za co odpowiadają wspomniane przyciski:
NAV:
Śledzenie radiala VOR lub lokalizatora.
APR:
Wykonanie podejścia ILS, śledząc lokalizator i ścieżkę schodzenia jednocześnie.
REV:
Przechwycenie ILS przed zakrętem proceduralnym (np. oddalając się od lokalizatora).
Tak więc w rzeczywistości spora część pracy, którą wykonałeś, mogła zostać wykonana przez autopilota. Po starcie można było poprosić go o śledzenie radiala 009 od SJC aż do SUNOL w trybie NAV; w SUNOL można było poprosić go o wykonanie „podejścia z kursem wstecznym” z I-LVK w trybie REV; następnie wykonać zakręt proceduralny w trybie HDG; i w końcu utrzymywać lokalizator i ścieżkę schodzenia w trybie APR.
Jednak nie podałem Ci tych informacji z dwóch powodów. Po pierwsze, ręczne latanie (nawet gdy autopilot delikatnie trzyma Twoją rękę, tak jak to robiliśmy) daje lepsze wyobrażenie o tym, co się dzieje. Po drugie, w przypadku niektórych z tych funkcji, autopilot nie zachowuje się tak, jak mówi oficjalna instrukcja obsługi – najlepiej trzymać się funkcji, o których wiadomo, że działają dobrze.
Chociaż podejścia ILS mogą precyzyjnie naprowadzić nas na pas, precyzyjniej niż podejścia VFR, NDB lub VOR, nadal potrzebujemy pewnej widoczności aby wylądować18. A zatem potrzebujemy w jakiś sposób zdecydować, czy lądowanie jest możliwe, czy nie. Do tego właśnie służy sekcja dotycząca minimów na mapie podejścia (pokolorowana na zielono na rys. 10.10). W kategorii oznaczonej „S-ILS 25R” (to my) zobaczymy zapis „597-1/2 200(200-1/2)” dla wszystkich kategorii statków powietrznych (od A do D). To mówi nam, że możemy lecieć ścieżką schodzenia do wysokości 597 stóp nad poziomem morza (lub inaczej 200 ft nad pasem startowym). Na wysokości 597 ft podejmujemy decyzję – jeśli nie widzimy pasa startowego, musimy wykonać nieudane podejście. Zatem wysokość 597 ft to nasza wysokość decyzyjna (DH – Decision Height).
Oprócz sprawdzania wysokościomierza, to konkretne podejście ma również inną wskazówkę, że jesteśmy blisko. A jest nią środkowy marker (MM – Middle Marker). Gdy będziemy nad tym markerem, to zabrzmi dźwięk serią kropka-kreska oraz żółta kontrolka oznaczona literą „M”, nad COMM1, będzie migać. Przelot nad środkowym markerem powinien pokrywać się z osiągnięciem wysokości decyzji19.
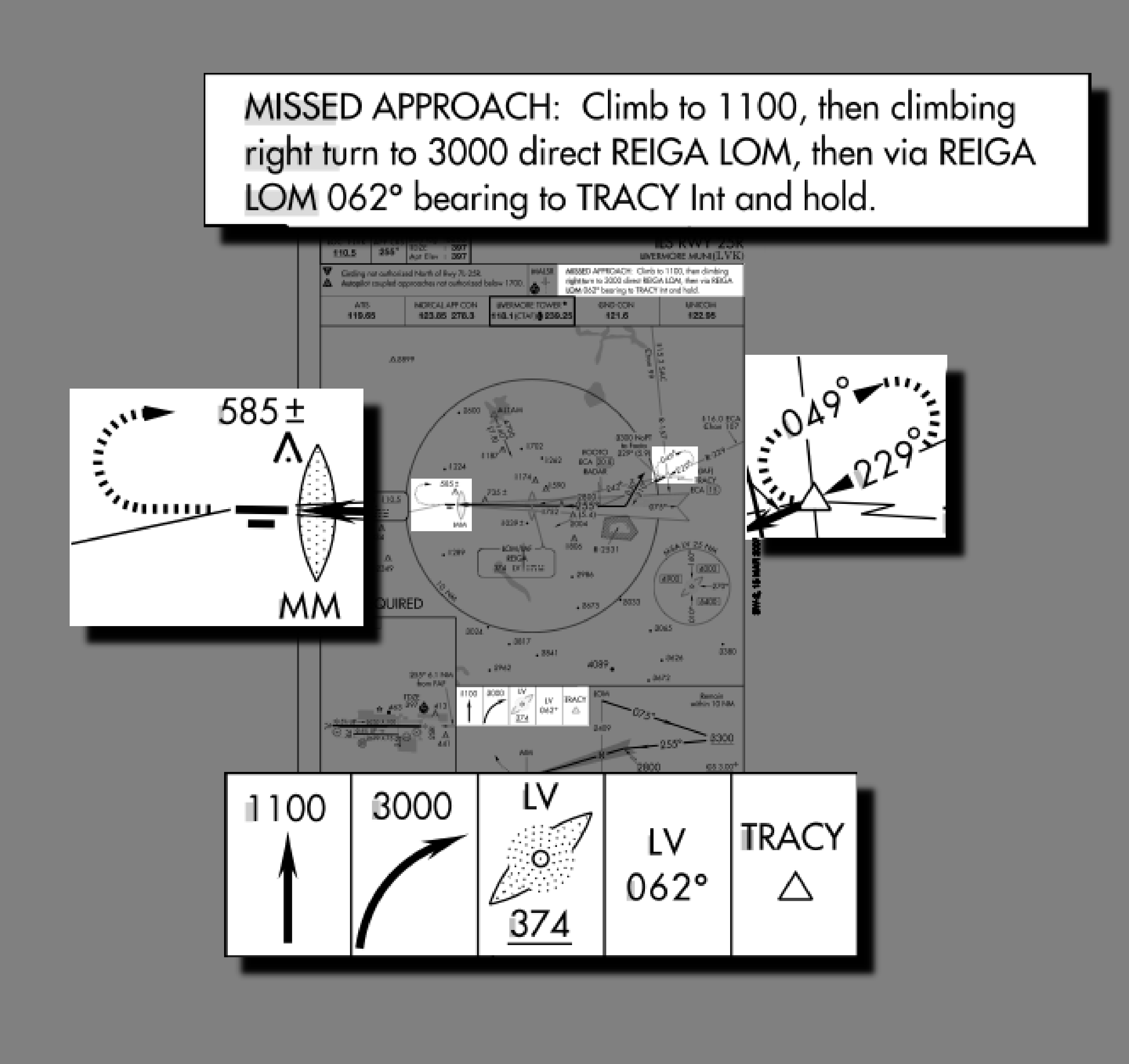
A co, jeśli nie widzisz pasa startowego na wysokości decyzji? Jak można się było spodziewać, tak jak nie można wylądować na chybił trafił, tak nie można po prostu odejść na drugi krąg, na chybił trafił. Jest do tego procedura. Procedura nieudanego podejścia. Jest to pokazane w kilku miejscach na mapie podejścia (patrz rys. 10.17): u góry, gdzie jest napisane „MISSED APPROACH”, w widoku z góry, gdzie widać strzałkę z przerywaną linią odchodzącą z końca pasa startowego i owalem narysowanym po prawej stronie, przerywaną linią oraz w widoku z boku, gdzie szereg pól pokazuje graficznie, co robić. W naszym przypadku wszystko to mówi nam, że:
Oczekiwanie (holding), jak można się domyślić, to miejsce, w którym można „zaparkować”, podczas porządkowania różnych rzeczy. Oczekiwanie ma swój własny zestaw procedur i technik, których nie będziemy tutaj omawiać, ponieważ…
W
naszym
idealnym
świecie
symulatorów,
prawdopodobnie
nie
będziesz
musiał
wykonywać
nieudanego
podejściaDostrzeż
pas;
wyłącz
autopilota;
miń
środkowy
marker.
Zakładając,
że
zostałeś
na
ścieżce
schodzenia,
powinieneś
wyłonić
się
z
chmur
na
wysokości
decyzji,
a
przy
widoczności
800 metrów
pas
startowy
powinien
być
wkrótce
widoczny.
Mając
w
zasięgu
wzroku
pas
startowy,
możesz
ostro
skręcić
na
jego
kurs20
(bardzo
trudno
jest
być
idealnie
ustawionym)
i
możesz
„normalnie”
wylądować
(co
dla
mnie
wymaga
dużo
podskakiwania
i
przeklinania).Wyląduj;
zjedz hamburgera Po wylądowaniu zaparkuj samolot, a następnie wyjdź z kokpitu i zjedz
kolejnego hamburgera!

To było sporo informacji w krótkim czasie, dość brutalne wprowadzenie do latania IFR. Mam nadzieję, że zamiast zniechęcić, zaostrzyłem Twój apetyt na więcej, bo jest więcej. Niektóre z głównych problemów, które zignorowałem, to:
Wiatr
Bywa sporym problemem. Latanie IFR przy bocznym wietrze ma wpływ na wszystko co robisz i musisz być tego świadomy. W przeciwnym razie Twoja nawigacja może wyprowadzić Cię na manowce.
Latanie bez autopilota
Autopilot robi wszystko, co w jego mocy, ale nie należy mu całkowicie ufać. Musisz być przygotowany na samodzielne pilotowanie.
Dryf żyroskopowego wskaźnika kursu
Żyroskopowy wskaźnik kursu (DG) w C172P nie jest doskonały. Z biegiem czasu kierunek, który podaje, jest coraz mniej wiarygodny – precesja. Dlatego musi on być okresowo kalibrowany względem kompasu (używaj pokrętła OBS na żyroskopowym wskaźniku kursu, aby go zsynchronizować z kompasem podczas stabilnego przelotu).
Mapy IFR
Wykorzystaliśmy mapy, które tak naprawdę są przeznaczone do lotów VFR. Istnieje cały zestaw map poświęcony wyłącznie lotom IFR.
Inni piloci muszą wiedzieć, co robisz. Poza tym, prawdopodobnie kontrola lotów powie Ci co masz robić, w tym mogą chcieć abyś zignorował mapę podejścia, którą tak pilnie studiowałeś.
SID-y/DP-y, drogi lotnicze i STAR-y
W tym poradniku przedstawiono IAP, które są standardowymi sposobami podejścia do lądowania. W lotach IFR istnieją standardowe sposoby na opuszczenie lotniska, zwane SID (Standard Instrument Departure) lub DP (Departure Procedure), standardowe sposoby podróżowania między lotniskami (drogi lotnicze) oraz standardowe sposoby przejścia z dróg lotniczych do IAP zwane STAR (Standard Terminal Arrival Route).
Holding
Większość nieudanych podejść kończy się gdzieś w kręgach oczekiwania, więc dobrze wiedzieć, jak tam latać.
GPS
Obecnie większość małych samolotów wyposażona jest w GPS, który szybko zastępuje radiowe pomoce nawigacyjne.
Jeśli chcesz dowiedzieć się więcej, zapoznaj się z następującymi pozycjami:
Flight Simulator Navigation, autorstwa Charlesa Wooda. Obejmuje wszystko, od podstawowej nawigacji po podejścia ILS, z wieloma przykładami i lotami ćwiczebnymi, aby poprawić swoje umiejętności. Wszystko jest połączone ciekawą fabułą, w której jesteś pilotem fikcyjnej firmy czarterowej.
Są jednak dwa zastrzeżenia. Po pierwsze, lektura ta jest oparta o Microsoft Flight Simulator 98, więc będziesz musiał przekonwertować sobie to co tam jest napisane na FlightGear. Po drugie, jest trochę przestarzała, i zaszły już spore zmiany względem tego co mamy obecnie w rzeczywistości. Zlikwidowano radiolatarnie NDB, nowe podejścia zastąpiły stare – zniknęło nawet lotnisko! Potraktuj to jako okazję do nauki. Będziesz lepszy w znajdowaniu bardziej aktualnych informacji i nauczysz się nie ufać na ślepo mapom, tak jak nauczyłeś się nie ufać swoim instrumentom.
FlightSim.Com posiada bardzo pouczającą serię artykułów pt „How To … Use Approach Plates”. Zaczyna się od bardzo, bardzo gęstego poradnika, jak czytać mapę podejść, a następnie omawia zestaw podejść do Kodiak na Alasce. Opisy te stanowią doskonałe uzupełnienie metod przedstawionych w Flight Simulator Navigation Charlesa Wooda (patrz wyżej).
Jednak najbardziej interesująca jest sekcja druga – „Niebezpieczne podejścia” (Dangerous Approaches). Opisano tam podejścia na sześciu lotniskach na całym świecie, od Penticton w Kolumbii Brytyjskiej do Katmandu w Nepalu. Wybróbuj je, jeśli masz odwagę!
Ostrzeżenie – ta seria jest jeszcze bardziej skoncentrowana na Microsoft Flight Simulator (2000) niż poradnik Charlesa Wooda, a niektóre opisy są już nieaktualne (niektóre zewnętrzne linki nie działają oraz niektóre podejścia uległy zmianie).
1Zobacz https://pl.wikipedia.org/wiki/VOR
2Obsługa odbiorników COMM została omówiona w poradniku lotów nawigacyjnych.
3Wszystkie ważne akcje i zdarzenia zostaną podane na marginesie. Powinno to zapewnić ładne podsumowanie lotu, niezakłócone tekstem.
4Nadal go nie słyszysz? Sprawdź regulację głośności na odbiorniku NAV1. Jeśli to nie daje efektu, idź do menu Plik →Ustawienia dźwięku i dostosuj ustawienia. Jeśli to nie zadziała, sprawdź głośność na komputerze. Jeśli to nie zadziała, a masz głośniki zewnętrzne, dostosuj głośność na głośnikach. A jeśli to nie zadziała, sprawdź swoje uszy.
5Igła pozioma jest używana podczas lądowań ILS, co zostanie wyjaśnione później.
6Jeśli znudzi Ci się klikanie pokręteł, możesz to zrobić łatwiej wybierając z menu Wyposażenie →Radio.
7Możesz to też zrobić na inne sposoby – po prostu obserwój wysokościomierz, i kiedy dojdzie do 4000 ft, zmniejsz prędkość pionową do 0 lub naciśnij przycisk ALT, aby przejść do trybu utrzymywania wysokości. Natomiast używając pokrętła wyboru wysokości, dowiedzieliśmy się jak zrobić to automatycznie.
8Chyba, że lecisz w przeciwnym kierunku, ale to już inna historia.
9Zobacz https://pl.wikipedia.org/wiki/Distance_measuring_equipment
10Zobacz https://pl.wikipedia.org/wiki/Radiolatarnia_bezkierunkowa.
11Tryb antenowy jest zwykle używany do identyfikacji NDB, ponieważ daje lepszy odbiór dźwięku. Jednak w trybie antenowym, ADF nie będzie wskazywał kierunku do radiolatarni – wskazówka pozostanie skierowana bezpośrednio w prawo, co oznacza brak sygnału.
12Właściwie przy bocznym wietrze, jest to zła technika, ale zignoruję wiatr, aby uprościć ten poradnik.
13Licznik można również ustawić tak, aby odliczał czas od podanego czasu – z tym wyjątkiem, że funkcja ta nie została jeszcze zaimplementowana.
14Właściwie daleko od kursu. Powiększyłem kąty, aby wyjaśnienie było jaśniejsze.
15Można pomyśleć „Czy nie byłoby miło, gdyby ADF obracał tarczę kompasu automatycznie?” Cóż, taki ADF istnieje i ma swój własny akronim – RMI (Radio Magnetic Indicator).
16Zobacz https://pl.wikipedia.org/wiki/Instrument_landing_system, aby uzyskać więcej informacji.
17Być może. Mogą istnieć fałszywe ścieżki schodzenia, a FlightGear je modeluje, więc musimy się upewnić, że znajdujemy się na tej prawdziwej. Dlatego jednym z celów zakrętu proceduralnego jest ustawienie się we właściwej pozycji, na właściwej wysokości, aby przechwycić prawdziwą ścieżkę schodzenia.
18Chyba że jest to podejście ILS kategorii IIIC.
19Jak można się domyślić, pozostała kontrolka – biała i oznaczona literą „A”, wskazuje na przejście wewnętrznego markera (Inner Marker). Nasze podejście nie ma takiego markera, ale pas startowy 28R w San Francisco tak. Przelatując nad nim, powinieneś usłyszeć szybką serię kropek o wysokim tonie. Dlaczego jest oznaczony jako „A”, a nie „I” (od Inner)? Ponieważ w odległych czasach używano go również do identyfikowania przejścia nad markerami „dróg lotniczych” (Airway) wzdłuż ścieżek zasięgu radia.
20Pamiętając oczywiście o wyłączeniu autopilota.