Primero: en principio, todo lo que aplica a helicópteros reales, aplica a FlightGear. Las maniobras fundamentales están bien descritas aquí: https://www.cybercom.net/~copters/pilot/maneuvers.html. Algunos detalles se simplifican en FlightGear, en concreto, el manejo del motor y algunas sobrecargas no se simulan o no tienen ninguna consecuencia. En FlightGear no es posible (hasta la fecha) dañar un helicóptero en vuelo.
El modelo de vuelo de helicópteros de FlightGear es bastante realista. Las únicas excepciones son las “condiciones de anillo de vórtice”. Estas ocurren si desciendes demasiado rápido y perpendicularmente (sin velocidad de avance). El helicóptero puede entrar en la corriente descendente de su propio rotor, lo que hace que la sustentación se reduzca sustancialmente. Salirte de esta condición solo es posible en altitudes más altas. En Internet puedes encontrar un video de un helicóptero Seaking, que se puso en esta condición durante una demostración de vuelo y aterrizó tan fuerte que quedó completamente destruido.
Para todos los helicópteros de FlightGear, los parámetros no están completamente optimizados y, por lo tanto, los datos de rendimiento entre el modelo y el original pueden desviarse ligeramente. Respecto al hardware, recomiendo el uso de un “buen” joystick. Se recomienda un joystick sin muelles porque no se centrará solo. Puedes quitarle los muelles a un joystick normal o usar un joystick con retroalimentación de fuerza, con la alimentación desconectada. Además, el joystick debe tener un “controlador de empuje” (acelerador). Para controlar el rotor de cola, debes tener pedales o al menos un joystick giratorio – usar un teclado es difícil. FlightGear admite múltiples joysticks conectados a la vez.
El número de helicópteros disponibles en FlightGear es limitado. En mi opinión, el Bo105 es el más fácil de volar, ya que reacciona mucho más de forma directa que otros helicópteros. Respecto al comportamiento en vuelo, también puedo recomendar el S76C. El S76C reacciona con más retardo que el Bo.
Una vez que hayas cargado FlightGear, tómate un momento para centralizar los controles moviéndolos en todas las direcciones. En particular, el colectivo suele estar al máximo al inicio.

El helicóptero está controlado por cuatro funciones. La palanca (joystick) controla dos de ellos, la inclinación del disco del rotor (y por tanto la inclinación del helicóptero) hacia la derecha/izquierda y hacia delante/atrás. Juntas, estas funciones se denominan “control cíclico de las palas”. Luego está el “control colectivo de palas”, que es controlado por el controlador de empuje. Esto provoca un cambio del empuje producido por el rotor. Dado que la potencia del rotor principal transfiere un par al fuselaje, este debe ser compensado por el rotor de cola. Dado que el par depende del colectivo y de las condiciones de vuelo, así como del viento en el fuselaje, el piloto también controla el rotor de cola mediante los pedales. Si presionas el pedal derecho, ¡el helicóptero gira a la derecha!. Los pedales no son un volante. Usando los pedales puedes girar el helicóptero alrededor del eje vertical. El número de revoluciones del rotor se mantiene constante (si es posible) por la aeronave.
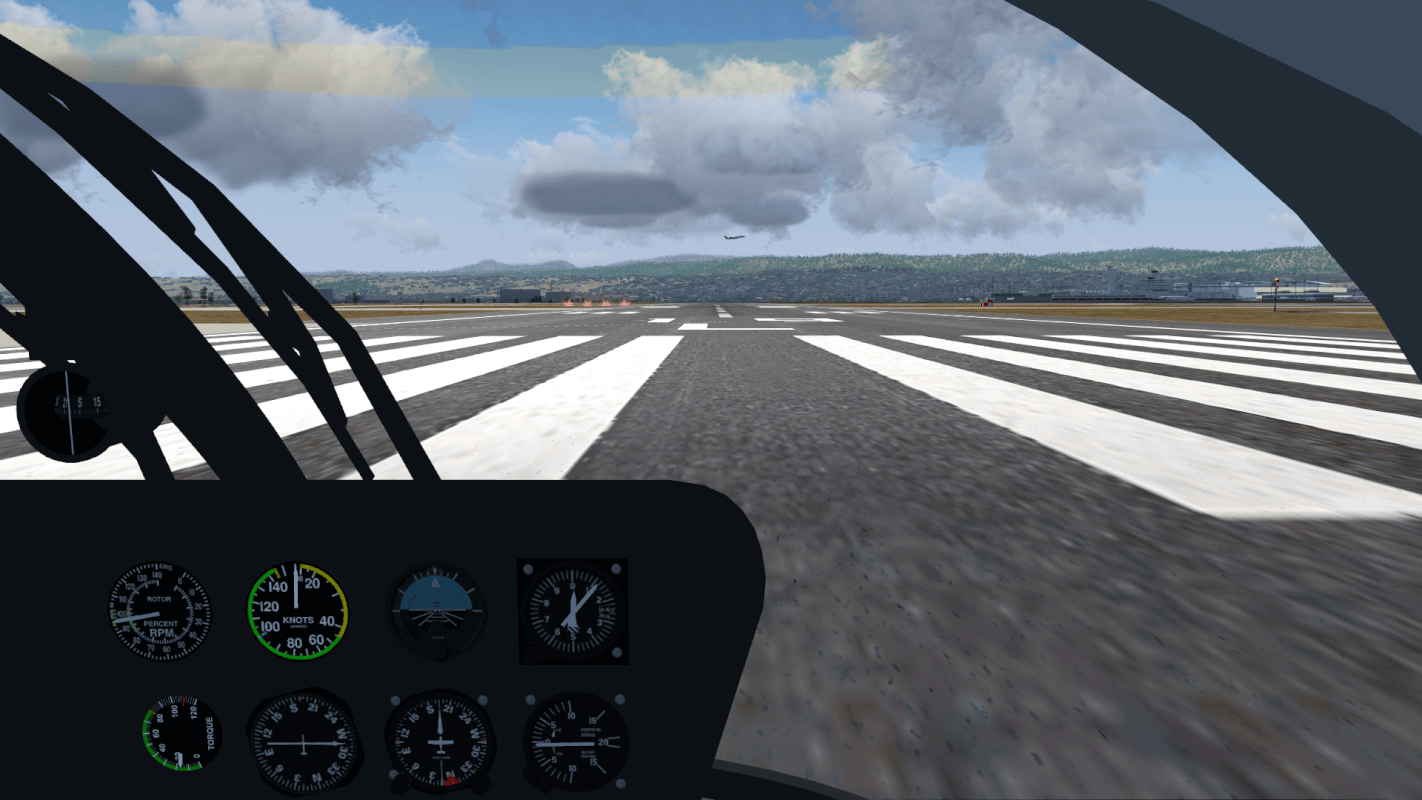
Primero reduce el colectivo al mínimo. Para aumentar el empuje del rotor, debes “tirar” del colectivo. Por lo tanto, para un colectivo mínimo, debes empujar el control hacia abajo (¡esa es la posición de aceleración total del controlador de empuje!). De la misma manera, “plena potencia” tiene el controlador de empuje en la posición neutra. Inicia el motor con la tecla }. Después de unos segundos, el rotor comenzará a girar y acelerará lentamente. Mantén la palanca y los pedales más o menos centrados. Espera hasta que el rotor haya terminado de acelerar. Para el Bo105 hay un instrumento para la velocidad del motor y del rotor a la izquierda de la fila superior.
Una vez completada la aceleración del rotor, tira del colectivo muy lentamente. Mantén tu ojo en el horizonte. Si el helicóptero se inclina o gira, aunque sea ligeramente, deja de aumentar el colectivo y corrige la posición/movimiento con la palanca y los pedales. Si tienes éxito, continúa tirando del colectivo (¡lentamente!).
A medida que el helicóptero despega, aumenta un poco más el colectivo e intenta mantener el helicóptero en una posición nivelada. El principal desafío es reaccionar al movimiento giratorio involuntario del helicóptero con las entradas de control correctas. Sólo tres cosas te pueden ayudar: practicar, practicar y practicar. Es bastante común que se necesiten horas de práctica para lograr un vuelo estacionario que se vea medio bien. Nota: La posición de la palanca en un vuelo estacionario estable no es la posición central del joystick.
Para evitar la frustración continua de tratar de conseguir un vuelo nivelado, puedes intentar volar hacia adelante. Después del despegue, sigue tirando del colectivo durante un rato y luego baja el morro ligeramente con la palanca de control. El helicóptero acelerará hacia adelante. Con la velocidad de avance, el rotor de cola no tiene que controlarse con tanta precisión debido al viento relativo que viene directamente de delante. Volando hacia delante el comportamiento del vuelo es bastante similar al de un avión mal compensado. La posición “neutral” de la palanca dependerá de la velocidad aerodinámica y del colectivo.
La transición del vuelo hacia adelante al vuelo estacionario es más fácil si reduces la velocidad lentamente levantando el morro del helicóptero. Al mismo tiempo, reduce el colectivo para evitar que el helicóptero ascienda. A medida que el helicóptero reduce la velocidad, se reduce la “ascensión de traslación” y tendrás que compensar tirando del colectivo. Cuando la velocidad sea casi cero, baja el morro a la posición en la que estaba en vuelo estacionario. De lo contrario, ¡el helicóptero acelerará hacia atrás!
Para aterrizar el helicóptero, se debe hacer una transición a un vuelo estacionario como se describe anteriormente mientras se reduce la altitud usando el colectivo. Justo antes de tocar el suelo, reduce lentamente la velocidad de descenso. Se logra un aterrizaje perfecto si logras poner a cero la altitud, la velocidad y la tasa de descenso al mismo tiempo (suavemente). Sin embargo, tales aterrizajes son extremadamente difíciles. La mayoría de los pilotos realizan un vuelo estacionario más o menos cerca del suelo y luego descienden lentamente al suelo. Aterrizar con velocidad de avance es más fácil, sin embargo, debes asegurarte de no aterrizar con ningún componente lateral (de lado) para evitar volcar.
Merece la pena mencionar brevemente la autorrotación. Esta es una condición de vuelo sin potencia, donde el flujo de aire a través de los rotores gira el propio rotor. A una altitud adecuada, selecciona un punto de aterrizaje (al principio, del tamaño de un aeródromo más grande) y luego apaga el motor presionando {. Reduce el colectivo al mínimo, coloca el rotor de cola a aproximadamente 0° de incidencia (con el Bo pisa el pedal derecho aproximadamente a la mitad, con el As350 el izquierdo). Haz una aproximación a unos 80 nudos. No permitas que la velocidad del rotor aumente más de un pequeño porcentaje sobre el 100 %, de lo contrario, el rotor se dañará (aunque esto no se simula actualmente). Al llegar al suelo, reduce la velocidad levantando el morro. La velocidad de descenso disminuirá al mismo tiempo, por lo que no es necesario que tires del colectivo. Puede darse el caso de que la velocidad del rotor supere el rango permitido. Contrarresta esto levantando el colectivo si es necesario. Cuando estés justo por encima del suelo, reduce la velocidad de descenso tirando del colectivo. El objetivo es aterrizar con una velocidad de descenso muy baja y sin velocidad de avance. Con la velocidad de avance es más fácil, pero existe el peligro de volcar si los patines no están alineados paralelos a la dirección de vuelo. Durante la aproximación no es necesario ajustar el rotor de cola, ya que sin potencia casi no hay par. Si sientes (después de un poco de práctica), que la autorrotación es demasiado fácil, inténtalo con una carga útil más realista a través del menú Equipamiento → Combustible y carga.